The overall structure of this project and report follows the traditional CRISP-DM format. However, instead of the CRISP-DM’S “4 Modeling” section, we inserted the “6 step modeling process” of Dr. Warren Powell in section 4 of this document. Dr Powell’s unified framework shows great promise for unifying the formalisms of at least a dozen different fields. Using his framework enables easier access to thinking patterns in these other fields that might be beneficial and informative to the sequential decision problem at hand. Traditionally, this kind of problem would be approached from the reinforcement learning perspective. However, using Dr. Powell’s wider and more comprehensive perspective almost certainly provides additional value.
In order to make a strong mapping between the code in this notebook and the mathematics in the Powell Unified Framework (PUF), we follow the following convention for naming Python identifier names:
Superscripts
variable names have a double underscore to indicate a superscript
\(X^{\pi}\): has code X__pi, is read X pi
Subscripts
variable names have a single underscore to indicate a subscript
\(S_t\): has code S_t, is read ‘S at t’
\(M^{Spend}_t\) has code M__Spend_t which is read: “MSpend at t”
Arguments
collection variable names may have argument information added
\(X^{\pi}(S_t)\): has code X__piIS_tI, is read ‘X pi in S at t’
the surrounding I’s are used to imitate the parentheses around the argument
Next time/iteration
variable names that indicate one step in the future are quite common
\(R_{t+1}\): has code R_tt1, is read ‘R at t+1’
\(R^{n+1}\): has code R__nt1, is read ‘R at n+1’
Rewards
State-independent terminal reward and cumulative reward
\(F\): has code F for terminal reward
\(\sum_{n}F\): has code cumF for cumulative reward
State-dependent terminal reward and cumulative reward
\(C\): has code C for terminal reward
\(\sum_{t}C\): has code cumC for cumulative reward
Vectors where components use different names
\(S_t(R_t, p_t)\): has code S_t.R_t and S_t.p_t, is read ‘S at t in R at t, and, S at t in p at t’
the code implementation is by means of a named tuple
self.State = namedtuple('State', SVarNames) for the ‘class’ of the vector
self.S_t for the ‘instance’ of the vector
Vectors where components reuse names
\(x_t(x_{t,GB}, x_{t,BL})\): has code x_t.x_t_GB and x_t.x_t_BL, is read ‘x at t in x at t for GB, and, x at t in x at t for BL’
the code implementation is by means of a named tuple
self.Decision = namedtuple('Decision', xVarNames) for the ‘class’ of the vector
self.x_t for the ‘instance’ of the vector
Use of mixed-case variable names
to reduce confusion, sometimes the use of mixed-case variable names are preferred (even though it is not a best practice in the Python community), reserving the use of underscores and double underscores for math-related variables
1 BUSINESS UNDERSTANDING
Inventory management is a critical component of any business, whether it be a small retail store or a multinational corporation. At its core, inventory management is the process of tracking and controlling a company’s inventory, from raw materials to finished products. Proper inventory management is important for several reasons.
First and foremost, inventory management helps businesses avoid stock overages and underages (overstocks and stockouts). By tracking inventory levels and forecasting demand, businesses can ensure that they always have the right amount of product on hand to meet customer needs without overbuying and tying up capital in excess inventory. This helps businesses maintain a healthy cash flow and avoid costly stockouts that can result in lost sales and dissatisfied customers.
In addition, effective inventory management can help businesses streamline their operations and improve their overall efficiency. By reducing excess inventory and optimizing order quantities and lead times, businesses can minimize waste and improve their supply chain management. This can lead to cost savings, improved profitability, and increased customer satisfaction.
Finally, inventory management is critical for businesses that need to comply with regulatory requirements, such as those in the pharmaceutical or food industries. Proper inventory tracking and documentation can help businesses meet these requirements and avoid costly fines and penalties.
Overall, inventory management is an essential function for any business that wants to operate efficiently, meet customer demand, and maximize profitability. Effective inventory management requires careful planning, accurate data, and the right tools and processes to ensure that businesses always have the right amount of product on hand, at the right time, and at the right cost.
In this project the client had a need to be convinced of the benefits of formal optimized sequential decision making. This was provided in the form of a series of POCs.
2 DATA UNDERSTANDING
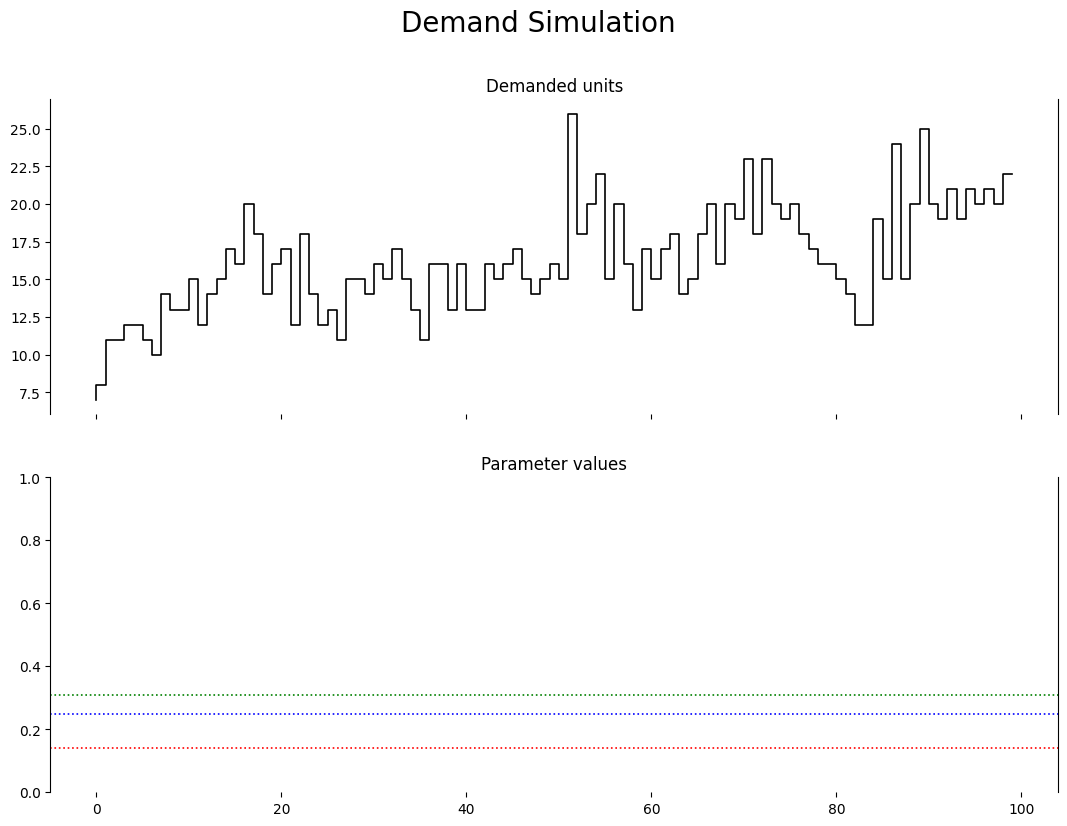
Next, we will look at how we will simulate the data for this problem.
from collections import namedtuple, defaultdictimport numpy as npimport pandas as pdimport matplotlib.pyplot as pltfrom copy import copyimport timefrom scipy.ndimage.interpolation import shiftimport picklefrom bisect import bisectimport mathfrom pprint import pprintimport matplotlib as mplpd.options.display.float_format ='{:,.4f}'.formatpd.set_option('display.max_columns', None)pd.set_option('display.max_rows', None)pd.set_option('display.max_colwidth', None)! python --version
Python 3.10.11
DeprecationWarning: Please use `shift` from the `scipy.ndimage` namespace, the `scipy.ndimage.interpolation` namespace is deprecated.
from scipy.ndimage.interpolation import shift
We will simulate the inventory demand, \(D\), by: \[
D_{t+1} = \theta_0 D_t + \theta_1 D_{t-1} + \theta_2 D_{t-2} + \epsilon_{pois(5)}
\] where \[
\begin{aligned}
\theta_0 &= 0.14 \\
\theta_1 &= 0.31 \\
\theta_2 &= 0.25 \\
\end{aligned}
\]
# NOTE:# R__max: maximum number of inventory units# R_0: initial number of inventory unitsparDf = pd.read_excel(f'{base_dir}/{file}', sheet_name='ParamsModel', index_col=0);print(f'{parDf}')parDict = parDf.T.to_dict('list') #.params = {key:v for key, value in parDict.items() for v in value}params['seed'] = seedparams['T'] =min(params['T'], 192);print(f'{params=}')
0
Index
Algorithm GridSearch
T 195
eta 1
R__max 57
R_0 0
params={'Algorithm': 'GridSearch', 'T': 192, 'eta': 1, 'R__max': 57, 'R_0': 0, 'seed': 189654913}
parDf = pd.read_excel(f'{base_dir}/{file}', sheet_name='GridSearch', index_col=0);print(parDf)parDict = parDf.T.to_dict('list')paramsPolicy = {key:v for key, value in parDict.items() for v in value};print(f'{paramsPolicy=}')params.update(paramsPolicy); pprint(f'{params=}')
We will use the data provided by the simulator directly. There is no need to perform additional data preparation.
4 MODELING
4.1 Narrative
This first project in the Inventory Series tackles the simplest of inventory problems.
We have the following setting: Mr. Optimal is car lot inventory manager for the largest dealership in a big city. For now, he will only be responsible to manage the inventory level of a single car model, that of the Hyunday Elantra. He has a maximum number of lot spaces assigned to him (which is 57). He has a choice to strive to always keep these spaces occupied by new cars. This way he is unlikely to run out of stock and lose a sale due to that. However, capital is tied up by the unsold inventory in his lot space.
At the other extreme, he may choose to work on a just-in-time principle: Each time a potential customer expresses interest in this model, the customer will have to wait until he obtains a new car from the supplier. Of course, he will likely lose the sale, but the upside is that no capital is tied up in his inventory.
It seems intuitive that the optimal level of inventory will be somewhere between these extremes. The challenge is to find that optimal level. For now, we will assume that the buy and sell prices will remain constant. The only random variable will be the demand for this specific model. Another assumption is that ordered inventory will arrive immediately. In addition, unsatisfied demands are lost, i.e. there will be no ability to backlog unsatisfied demands.
4.2 Core Elements
This section attempts to answer three important questions: - What metrics are we going to track? - What decisions do we intend to make? - What are the sources of uncertainty?
For this problem, the only metric we are interested in is the amount of profit we make after each decision window. A single type of decision needs to be made at the start of each window - how many new cars to order. The only source of uncertainty is the level of demand for this model.
4.3 Mathematical Model | SUM Design
A Python class is used to implement the model for the SUM (System Under Management):
The exogenous information variables represent what we did not know (when we made a decision). These are the variables that we cannot control directly. The information in these variables become available after we make the decision \(x_t\).
We assume that any unsatisfied demand is lost. Additionally, we assume that the demand in each time period is revealed, so that we have:
\[
W_{t+1} = \hat{D}_{t+1}=D_{t+1}
\]
The exogenous information is obtained by a call to
DemandSimulator.simulate_demand(...)
The latest exogenous information can be accessed by calling the following method from class InventoryStorageModel():
The transition function describe how the state variables evolve over time. Because we currently have two state variables in the state, \(S_t=(R_t,D_t)\), we have the equations:
Note that x_t.x_t_ELA is currently the only component of \(x_t\). The ELA stands for Elantra.
4.3.5 Objective function
The objective function captures the performance metrics of the solution to the problem.
We can write the state-dependant reward (also called contribution) based on what we will receive between \(t-1\) and \(t\) (i.e. looking backward relative to \((S_t,x_t)\)):
\[
\begin{aligned}
C(S_t,x_t) = p^{sell}\min\{R_t,D_t\} - p^{buy}x_t
\end{aligned}
\] This is a deterministic expression.
Alternatively, we can write the state-dependant reward based on what we will receive between \(t\) and \(t+1\) (i.e. looking forward relative to \((S_t,x_t)\)):
\[
\begin{aligned}
C(S_t,x_t,\hat{D}_{t+1}) &= p^{sell}\min\{R_{t+1},D_{t+1}\} - p^{buy}x_t \\
&= p^{sell}\mathrm{min}\{(R_t-\mathrm{min}\{R_t,D_t\}+x_t), \hat{D}_{t+1}\} - p^{buy}x_t \quad \mathrm{(RLSO-Eq8.5)}
\end{aligned}
\] because, from (Eq. 1) and (Eq. 2) above: \[
\begin{aligned}
R_{t+1} &= R_t - \mathrm{min}\{R_t,D_t\}+x_t \quad (Eq. 1) \\
D_{t+1} &= \hat{D}_{t+1} \quad\quad\quad\quad\quad\quad\quad\quad (Eq. 2)
\end{aligned}
\] This is a stochastic expression due to the dependence on the random variable \(\hat{D}_{t+1}\). It is random because it comes from a stochastic process but it is also in the future.
Here is the complete implementation of the InventoryStorageModel class:
class InventoryStorageModel():def__init__(self, SVarNames, xVarNames, S_0, params, exogParams, possibleDecisions, p__buy, p__sell, W_fn=None, S__M_fn=None, C_fn=None):self.initArgs = paramsself.prng = np.random.RandomState(params['seed'])self.exogParams = exogParamsself.S_0 = S_0self.SVarNames = SVarNamesself.xVarNames = xVarNamesself.possibleDecisions = possibleDecisionsself.p__buy = p__buyself.p__sell = p__sellself.State = namedtuple('State', SVarNames) #. 'class'self.S_t =self.build_state(self.S_0) #. 'instance'self.Decision = namedtuple('Decision', xVarNames) #. 'class'self.cumC =0.0#. cumulative reward; use F or cumF for final (i.e. no cumulative) rewarddef reset(self):self.cumC =0.0self.S_t =self.build_state(self.S_0)def build_state(self, info):returnself.State(*[info[sn] for sn inself.SVarNames])def build_decision(self, info):returnself.Decision(*[info[xn] for xn inself.xVarNames])def W_fn(self, t): #. W_tt1 = dem_sim.simulate()return W_tt1def S__M_fn(self, t, x_t): #. D_tt1 =self.W_fn(t) R_tt1 =max( 0, self.S_t.R_t -min(self.S_t.R_t, self.S_t.D_t) + x_t.x_t_ELA ) #max to keep >0iflen(self.SVarNames) ==2: S_tt1 =self.build_state({'R_t': R_tt1, 'D_t': D_tt1})eliflen(self.SVarNames) ==3: S_tt1 =self.build_state({'R_t': R_tt1, 'D_t': D_tt1, 'D_t_1': self.S_t.D_t})return S_tt1# based on what we will receive between t and t+1 (i.e. looking *forward* relative to (S_t,x_t) #.# RLSO-Eq8.5def C_fn(self, x_t): Dhat_tt1 = dem_sim.simulate() C =\self.p__sell*min((self.S_t.R_t -min(self.S_t.R_t, self.S_t.D_t) + x_t.x_t_ELA), Dhat_tt1) \-self.p__buy*x_t.x_t_ELAreturn Cdef step(self, t, x_t):self.cumC +=self.C_fn(x_t)self.S_t =self.S__M_fn(t, x_t)return (self.S_t, self.cumC, x_t) #. for plotting
4.4 Uncertainty Model
As described in section 2, we will simulate the inventory demand, \(D\), by: \[
D_{t+1} = \theta_0 D_t + \theta_1 D_{t-1} + \theta_2 D_{t-2} + \epsilon_{pois(5)}
\]
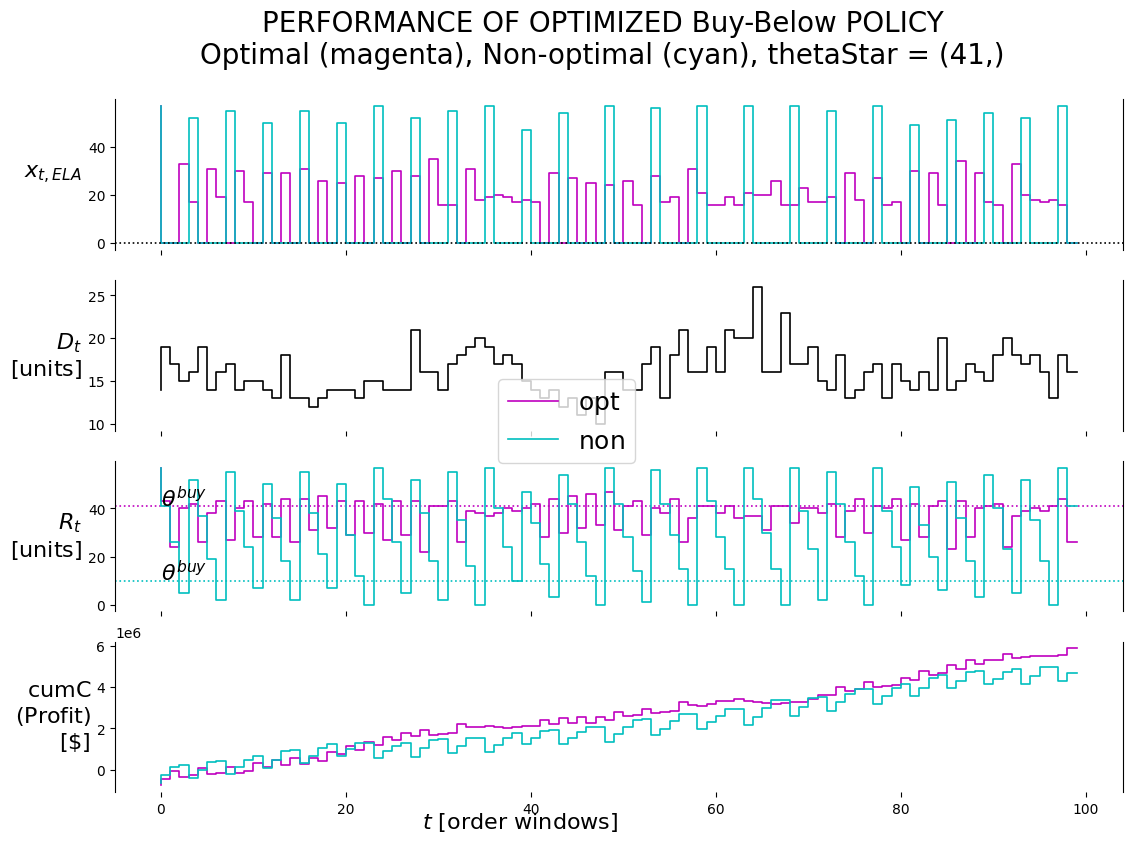
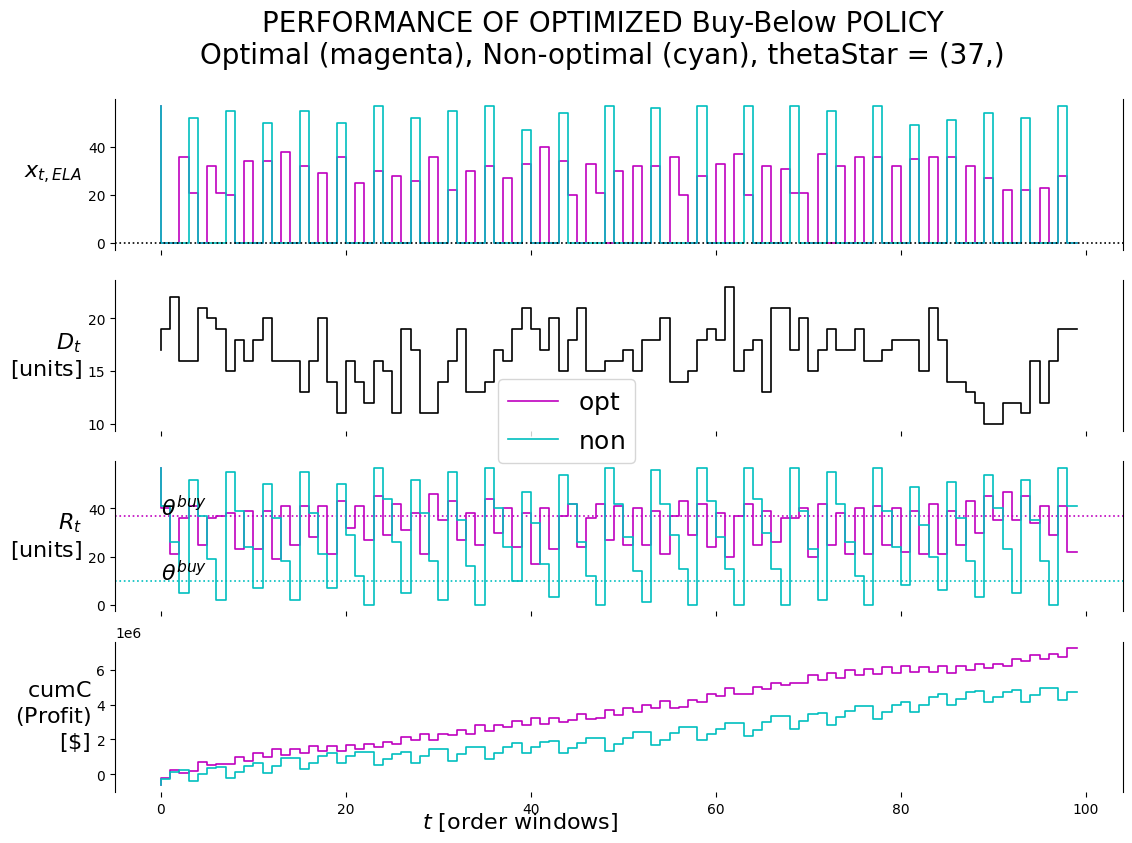
4.5 Policy Design
There are two main meta-classes of policy design. Each of these has two subclasses: - Policy Search - Policy Function Approximations (PFAs) - Cost Function Approximations (CFAs) - Lookahead - Value Function Approximations (VFAs) - Direct Lookaheads (DLAs)
In this project we will only use one approach: - A simple buy below parameterized policy (from the PFA class)
The buy below policy is implemented by the following method in class InventoryStoragePolicy():
def X__BuyBelow(self, t, S_t, theta, T):
info = {
'x_t_ELA': 0, #number of Elantras ordered
}
if t >= T:
print(f"ERROR: t={t} should not reach or exceed the max steps ({T})")
return self.model.build_decision(info)
theta__buy = theta[0] # theta__buy
if S_t.R_t <= theta__buy: # BUY if R_t <= theta__buy
info['x_t_ELA'] = self.model.initArgs['R__max'] - S_t.R_t
return self.model.build_decision(info)
4.5.1 Implementation of Policy Design
The InventoryStoragePolicy() class implements the policy design.
import randomclass InventoryStoragePolicy():def__init__(self, model, piNames):self.model = modelself.piNames = piNamesself.Policy = namedtuple('Policy', piNames)def X__BuyBelow(self, t, S_t, theta, T): info = {'x_t_ELA': 0, #number of Elantras ordered }if t >= T:print(f"ERROR: t={t} should not reach or exceed the max steps ({T})")returnself.model.build_decision(info) theta__buy = theta[0] # theta__buyif S_t.R_t <= theta__buy: # BUY if R_t <= theta__buy info['x_t_ELA'] =self.model.initArgs['R__max'] - S_t.R_treturnself.model.build_decision(info)def run_policy(self, piInfo, piName, params): model_copy = copy(self.model) T = params['T']for t inrange(T): #for each transition/step x_t =getattr(self, piName)(t, model_copy.S_t, piInfo, T) # piInfo is theta value _, _, _ = model_copy.step(t, x_t) cumC = model_copy.cumC return cumCdef perform_grid_search(self, params, thetas): tS = time.time() cumCI_theta_I = {} bestTheta =None i =0;print(f'... printing every 100th theta ...')for theta in thetas:if i%100==0: print(f'=== {theta=} ===') cumC =self.run_policy(theta, "X__BuyBelow", params) cumCI_theta_I[theta] = cumC best_theta =max(cumCI_theta_I, key=cumCI_theta_I.get)# print(f"Finishing theta {theta} with cumC {cumC:.2f}. Best theta so far {best_theta}. Best cumC {cumCI_theta_I[best_theta]:,}") i +=1print(f"Finishing GridSearch in {time.time() - tS:.2f} secs")print(f"Best theta: {best_theta}. Best cumC: {cumCI_theta_I[best_theta]:,}")return cumCI_theta_I, best_thetadef run_policy_sample_paths(self, theta, piName, params): FhatIomega__lI = []for l inrange(1, params['L'] +1): #for each sample-path model_copy = copy(self.model) record_l = [piName, theta, l] T = params['T']for t inrange(T): #for each transition/step x_t =getattr(self, piName)(t, model_copy.S_t, theta, T) _, _, _ = model_copy.step(t, x_t) FhatIomega__lI.append(model_copy.cumC) # just above (SDAM-eq2.9); Fhat for this sample-path is in model_copy.cumCreturn FhatIomega__lIdef perform_grid_search_sample_paths(self, params, thetas): tS = time.time() Fhat_mean =None Fhat_var =None Fhat__meanI_th_I = {} Fhat__stdvI_th_I = {} Fhat_mean =None i =0;print(f'... printing every 100th theta ...')for theta in thetas:if i%100==0: print(f'=== {theta=} ===') FhatIomega__lI =self.run_policy_sample_paths(theta, "X__BuyBelow", params) Fhat_mean = np.array(FhatIomega__lI).mean() #. (SDAM-eq2.9); call Fbar in future Fhat_var = np.sum(np.square(np.array(FhatIomega__lI) - Fhat_mean))/(params['L'] -1) Fhat__meanI_th_I[theta] = Fhat_mean Fhat__stdvI_th_I[theta]= np.sqrt(Fhat_var/params['L']) best_theta =max(Fhat__meanI_th_I, key=Fhat__meanI_th_I.get)# print(f"Finishing theta {theta} with cumC {Fhat__meanI_th_I[best_theta]:,}. Best theta so far {best_theta}. Best cumC {Fhat__meanI_th_I[best_theta]:,}") i +=1print(f"Finishing GridSearch in {time.time() - tS:.2f} secs")print(f"Best theta: {best_theta}. Best cumC: {Fhat__meanI_th_I[best_theta]:,}")return Fhat__meanI_th_I, Fhat__stdvI_th_I, best_thetadef grid_search_theta_values(self, thetas1): #. using vectors reduces loops in perform_grid_search_sample_paths() thetas = [(th1,) for th1 in thetas1]return thetasdef plot_Fhat_map(self, FhatI_theta_I, thetasX, thetasY, labelX, labelY, title): Fhat_values = [FhatI_theta_I[(thetaX,thetaY)] for thetaY in thetasY for thetaX in thetasX] Fhats = np.array(Fhat_values) increment_count =len(thetasX) Fhats = np.reshape(Fhats, (-1, increment_count)) fig, ax = plt.subplots() im = ax.imshow(Fhats, cmap='hot', origin='lower', aspect='auto')# create colorbar cbar = ax.figure.colorbar(im, ax=ax)# cbar.ax.set_ylabel(cbarlabel, rotation=-90, va="bottom")# we want to show all ticks... ax.set_xticks(np.arange(0,len(thetasX), 5)) ax.set_yticks(np.arange(0,len(thetasY), 5))# ... and label them with the respective list entries ax.set_xticklabels(thetasX[::5]) ax.set_yticklabels(thetasY[::5])# rotate the tick labels and set their alignment.#plt.setp(ax.get_xticklabels(), rotation=45, ha="right",rotation_mode="anchor") ax.set_title(title) ax.set_xlabel(labelX) ax.set_ylabel(labelY)#fig.tight_layout() plt.show()returnTruedef plot_Fhat_chart(self, FhatI_theta_I, thetasX, labelX, labelY, title, color_style): mpl.rcParams['lines.linewidth'] =1.2 xylabelsize =18 plt.figure(figsize=(25, 8)) plt.title(title, fontsize=20) Fhats = FhatI_theta_I.values() plt.plot(thetasX, Fhats, color_style) plt.xlabel(labelX, rotation=0, ha='right', va='center', fontweight='bold', size=xylabelsize) plt.ylabel(labelY, rotation=0, ha='right', va='center', fontweight='bold', size=xylabelsize) plt.show()
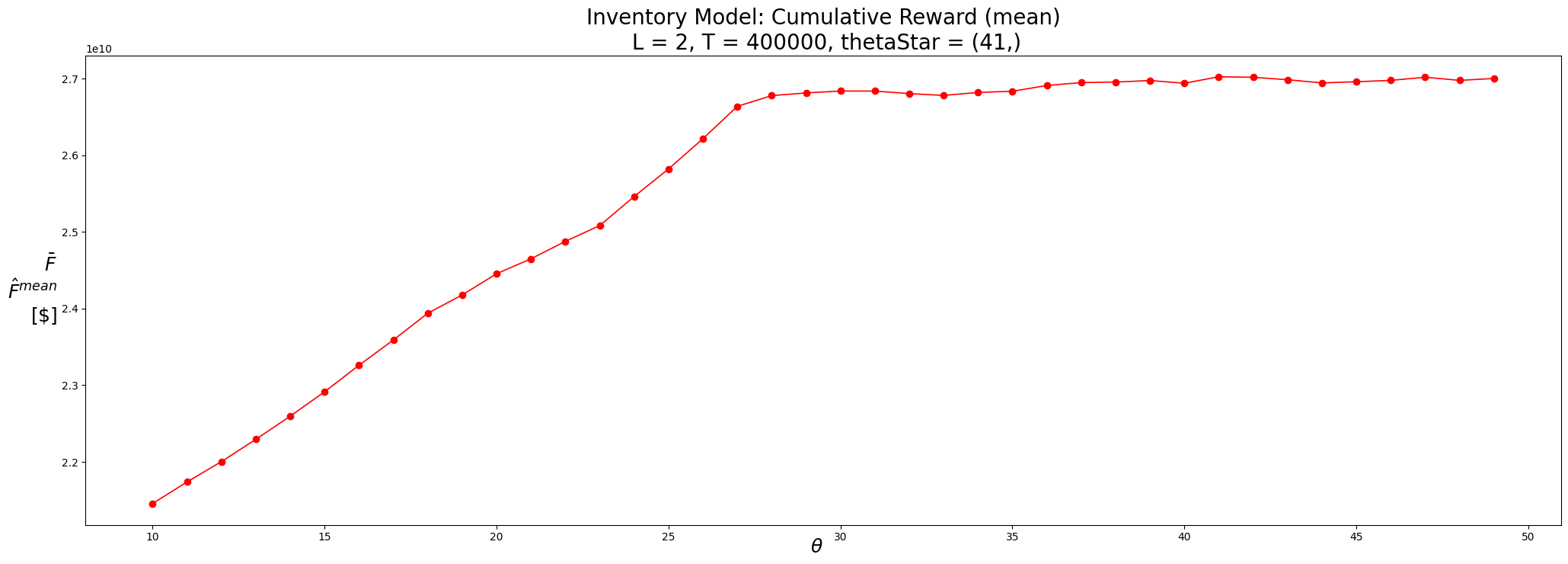
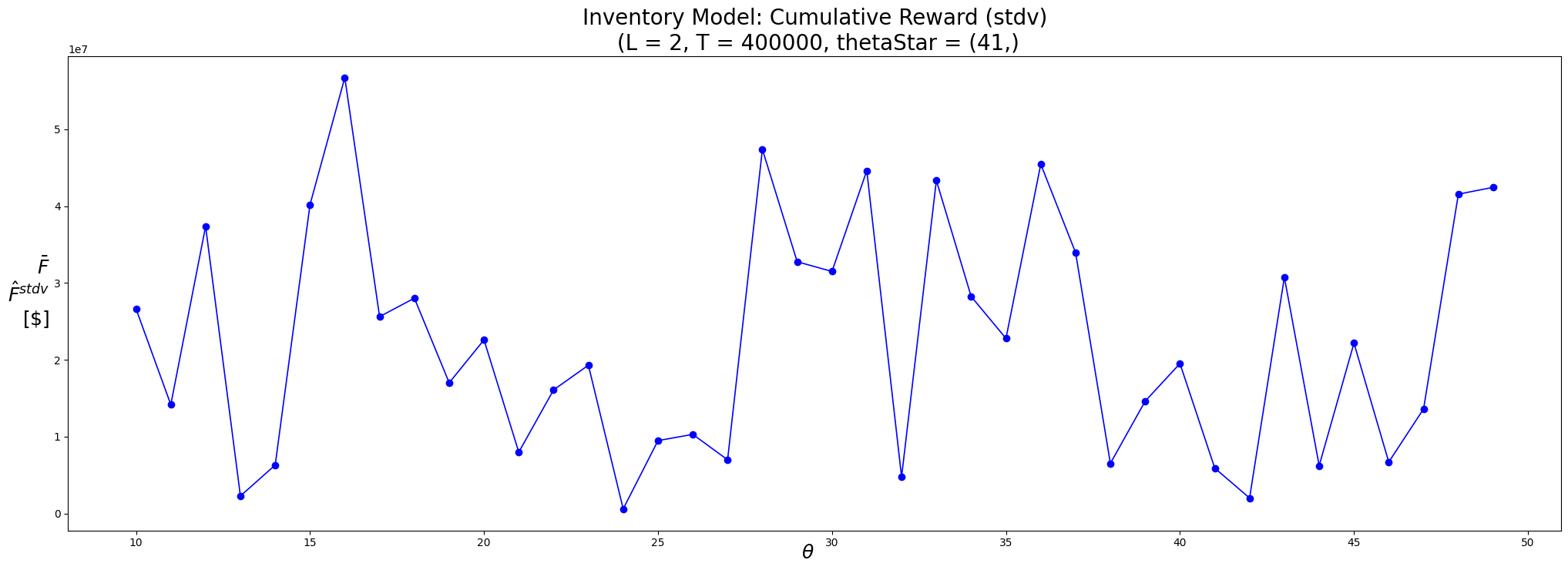
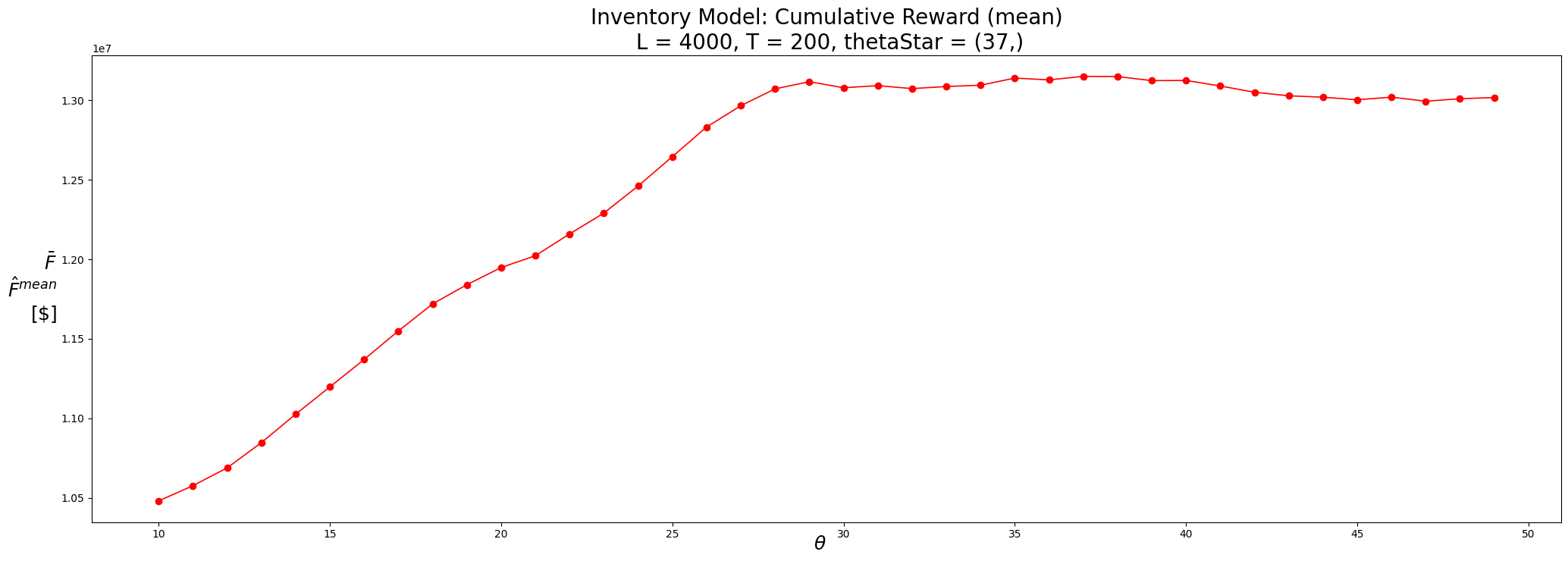
4.6 Policy Evaluation
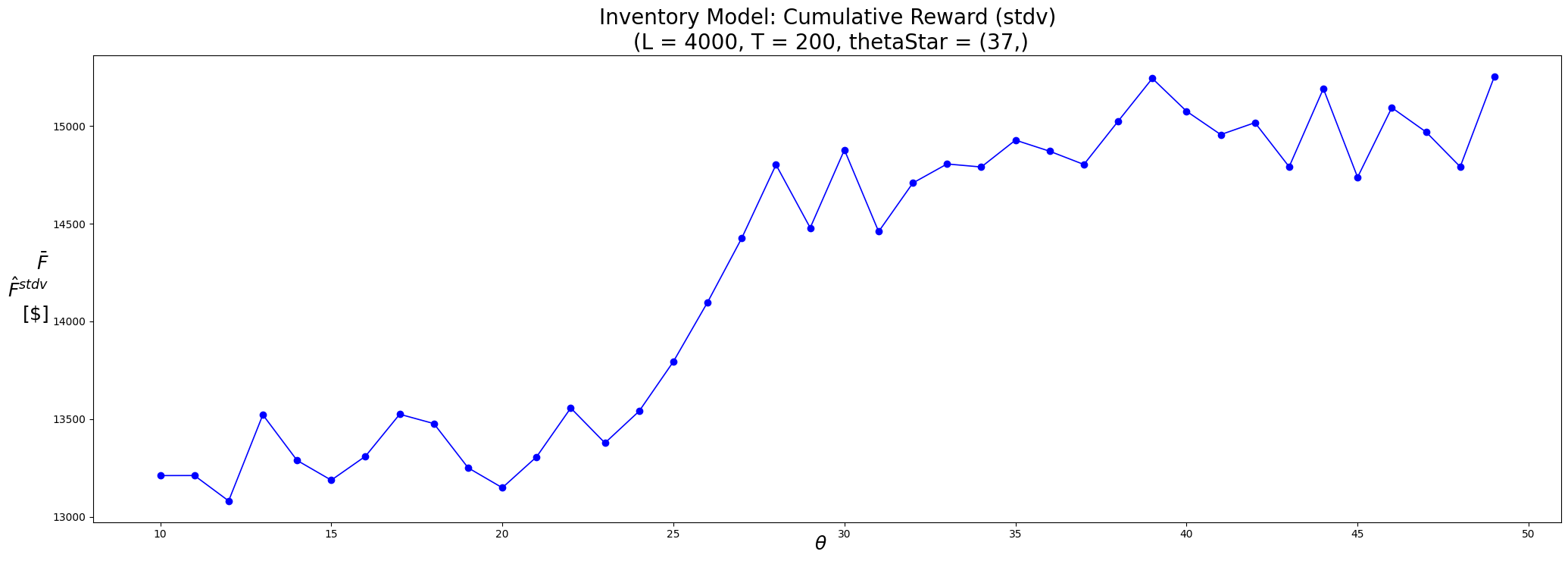
4.6.1 Training/Tuning
# UPDATE PARAMETERSparams.update({'Algorithm': 'GridSearch'}); pprint(f'{params=}')params.update({'R__max': 57})params.update({'R_0': 0})params.update({'eta': None})params.update({'theta_buy_min': 10}) #order levelparams.update({'theta_buy_max': 50}) #order levelparams.update({'theta_sell_min': None})params.update({'theta_sell_max': None})params.update({'L': 2}) #number of sample-pathsparams.update({'T': 100_000}) #number of transitions/steps in each sample-path# ADDITIONAL PARAMETERSpiNames = ['X__BuyBelow']SVarNames = ['R_t', 'D_t']S_0 = {'R_t': params['R_0'],'D_t': dem_sim.simulate(),}xVarNames = ['x_t_ELA']possibleDecisions =Nonep__buy =19_300#dollarsp__sell =23_470#dollarsexogParams = {} # we use simulationparams
# create a model and a policyM = InventoryStorageModel( SVarNames, xVarNames, S_0, params, exogParams, possibleDecisions, p__buy, p__sell)P = InventoryStoragePolicy(M, piNames)
# create a model and a policyM = InventoryStorageModel( SVarNames, xVarNames, S_0, params, exogParams, possibleDecisions, p__buy, p__sell)P = InventoryStoragePolicy(M, piNames)