!python --versionPython 3.7.15In previous projects we have only dealt with the prediction problem. In this project we move on to the control problem. We stay in the model-free or learning domain (rather than planning), i.e. making use of Reinforcement Learning algorithms. We will explore the depth of update dimension, considering both bootstrapping and non-bootstrapping methods like Temporal-Difference (TD) and Monte-Carlo (MC) algorithms respectively.
What is different about Control, rather than Prediction, is the depence on the concept of Generalized Policy Iteration (GPI).
The key concept of GPI is that we can: - Evaluate a policy with any Policy Evaluation method - Improve a policy with any Policy Improvement method
For all control algorithms there is a conflict between trying to learn Q-Values that associated with optimal behavior and the need to explore all actions. How do we address this?
To get to the Q-Learning algorithm we tweak the SARSA algorithm to make it Off-Policy.
First tweak: - Instead of generating - both action \(A\) and next action \(A'\) by the - same \(\epsilon\)-greedy policy - we generate - action \(A\) using (exploratory) behavior policy \(\mu\) - next action \(A'\) using target policy \(\pi\)
Second tweak: - Instead of advancing to the next time step by - setting \(S_{t+1}\) to \(S'_t\) and \(A_{t+1}\) to \(A'_t\) - we advance by - only setting \(S_{t+1}\) to \(S'_t\) while \(A_{t+1}\) is generated using the behavior policy \(\mu\)
!python --versionPython 3.7.15from typing import Callable, Iterator, Tuple, Mapping
import itertools
import inspect
from pprint import pprintWe need to ensure that the target policy eventually turns into the optimal policy. A straightforward way to do this is to have the target policy equal to the deterministic greedy policy derived from the Q-Value Function estimate at each step. This leads to the parameter update:
\[ \begin{aligned} \Delta w &= \alpha \cdot \delta_t \cdot \nabla_w Q(S_t,A_t;w) \end{aligned} \]
where
\[ \begin{aligned} \delta_t &= R_{t+1} + \gamma \cdot Q(S_{t+1}, \underset{a \in \mathcal A}{\text{ arg max}}Q(S_{t+1},a;w);w) - Q(S_t,A_t;w) \\ &= R_{t+1} + \gamma \cdot \underset{a \in \mathcal A}{\text{max}} Q(S_{t+1},a;w) - Q(S_t,A_t;w)) \end{aligned} \]
PolicyFromQType = Callable[
[QValueFunctionApprox[S, A], MarkovDecisionProcess[S, A]],
Policy[S, A]
]def q_learning(
mdp: MarkovDecisionProcess[S, A],
policy_from_q: PolicyFromQType,
states: NTStateDistribution[S],
approx_0: QValueFunctionApprox[S, A],
γ: float,
max_episode_length: int
) -> Iterator[QValueFunctionApprox[S, A]]:
q: QValueFunctionApprox[S, A] = approx_0
yield q
while True:
state: NonTerminal[S] = states.sample()
steps: int = 0
while isinstance(state, NonTerminal) and steps < max_episode_length:
policy: Policy[S, A] = policy_from_q(q, mdp)
action: A = policy.act(state).sample()
#. next_state, reward = mdp.step(state, action).sample()
next_state, reward = mdp.transition_action(state, action).sample() #.
next_return: float = max(
q((next_state, a))
for a in mdp.actions(next_state)
) if isinstance(next_state, NonTerminal) else 0.
q = q.update([((state, action), reward + γ * next_return)])
yield q
steps += 1
state = next_stateWe run the TAB TD Control (Q-Learning) algorithm on the Inventory problem.
Let us set the capacity \(C=5\), but keep the other parameters as before.
# capacity: int = 2
capacity: int = 5
poisson_lambda: float = 1.0
holding_cost: float = 1.0
stockout_cost: float = 10.0
gamma: float = 0.9si_mdp: SimpleInventoryMDPCap = SimpleInventoryMDPCap(
capacity=capacity,
poisson_lambda=poisson_lambda,
holding_cost=holding_cost,
stockout_cost=stockout_cost
)max_episode_length: int = 100
# epsilon_as_func_of_episodes: Callable[[int], float] = lambda k: k**-0.5
initial_learning_rate: float = 0.1
half_life: float = 10000.0
exponent: float = 1.0
# gamma: float = 0.9
q_learning_epsilon: float = 0.2initial_qvf_dict: Mapping[Tuple[NonTerminal[InventoryState], int], float] = {
(s, a): 0. for s in si_mdp.non_terminal_states for a in si_mdp.actions(s)
}
# initial_qvf_dictlearning_rate_func: Callable[[int], float] = learning_rate_schedule(
initial_learning_rate=initial_learning_rate,
half_life=half_life,
exponent=exponent
)qvfas: Iterator[QValueFunctionApprox[InventoryState, int]] = q_learning(
mdp=si_mdp,
policy_from_q=lambda f, m: mc.epsilon_greedy_policy(
q=f,
mdp=m,
ϵ=q_learning_epsilon
),
states=Choose(si_mdp.non_terminal_states),
approx_0=Tabular(
values_map=initial_qvf_dict,
count_to_weight_func=learning_rate_func
),
γ=gamma,
max_episode_length=max_episode_length
)
qvfas<generator object q_learning at 0x7fccc04f44d0>Now we get the final estimate of the Optimal Action-Value Function after n_episodes*max_episode_length. Then we extract from it the estimate of the Optimal State-Value Function and the Optimal Policy.
n_episodes = 10_000
n_updates = n_episodes*max_episode_length%%time
qvfa_lst = [qvfa for qvfa in itertools.islice(qvfas, n_updates)]CPU times: user 2min 52s, sys: 13.3 s, total: 3min 6s
Wall time: 2min 55sfinal_qvfa: QValueFunctionApprox[InventoryState, int] = iterate.last(qvfa_lst)final_qvfaTabular(values_map={(NonTerminal(state=InventoryState(on_hand=0, on_order=0)), 0): -34.29167989362301, (NonTerminal(state=InventoryState(on_hand=0, on_order=0)), 1): -28.019374282761202, (NonTerminal(state=InventoryState(on_hand=0, on_order=0)), 2): -26.963364564912712, (NonTerminal(state=InventoryState(on_hand=0, on_order=0)), 3): -28.069960994856284, (NonTerminal(state=InventoryState(on_hand=0, on_order=0)), 4): -28.869247283981043, (NonTerminal(state=InventoryState(on_hand=0, on_order=0)), 5): -30.556181243287856, (NonTerminal(state=InventoryState(on_hand=0, on_order=1)), 0): -25.153238171832434, (NonTerminal(state=InventoryState(on_hand=0, on_order=1)), 1): -20.281394896688038, (NonTerminal(state=InventoryState(on_hand=0, on_order=1)), 2): -19.950928140606013, (NonTerminal(state=InventoryState(on_hand=0, on_order=1)), 3): -20.784684662015437, (NonTerminal(state=InventoryState(on_hand=0, on_order=1)), 4): -22.093641772523796, (NonTerminal(state=InventoryState(on_hand=0, on_order=2)), 0): -20.19478258133303, (NonTerminal(state=InventoryState(on_hand=0, on_order=2)), 1): -18.893096534914584, (NonTerminal(state=InventoryState(on_hand=0, on_order=2)), 2): -19.379273590793662, (NonTerminal(state=InventoryState(on_hand=0, on_order=2)), 3): -20.355836068055073, (NonTerminal(state=InventoryState(on_hand=0, on_order=3)), 0): -20.86308913425141, (NonTerminal(state=InventoryState(on_hand=0, on_order=3)), 1): -19.766811430911748, (NonTerminal(state=InventoryState(on_hand=0, on_order=3)), 2): -21.28697236483091, (NonTerminal(state=InventoryState(on_hand=0, on_order=4)), 0): -20.74205917979043, (NonTerminal(state=InventoryState(on_hand=0, on_order=4)), 1): -22.335364962724913, (NonTerminal(state=InventoryState(on_hand=0, on_order=5)), 0): -23.397969626596268, (NonTerminal(state=InventoryState(on_hand=1, on_order=0)), 0): -25.63470756325478, (NonTerminal(state=InventoryState(on_hand=1, on_order=0)), 1): -21.36807528901896, (NonTerminal(state=InventoryState(on_hand=1, on_order=0)), 2): -21.099163467139114, (NonTerminal(state=InventoryState(on_hand=1, on_order=0)), 3): -21.51047077574053, (NonTerminal(state=InventoryState(on_hand=1, on_order=0)), 4): -23.018972972728424, (NonTerminal(state=InventoryState(on_hand=1, on_order=1)), 0): -21.55679273279888, (NonTerminal(state=InventoryState(on_hand=1, on_order=1)), 1): -19.82044156219879, (NonTerminal(state=InventoryState(on_hand=1, on_order=1)), 2): -20.368245151936414, (NonTerminal(state=InventoryState(on_hand=1, on_order=1)), 3): -21.38944048490033, (NonTerminal(state=InventoryState(on_hand=1, on_order=2)), 0): -21.050307002149907, (NonTerminal(state=InventoryState(on_hand=1, on_order=2)), 1): -20.84792154775406, (NonTerminal(state=InventoryState(on_hand=1, on_order=2)), 2): -22.621742143231202, (NonTerminal(state=InventoryState(on_hand=1, on_order=3)), 0): -21.83612334536198, (NonTerminal(state=InventoryState(on_hand=1, on_order=3)), 1): -22.901545610933507, (NonTerminal(state=InventoryState(on_hand=1, on_order=4)), 0): -24.259325423298947, (NonTerminal(state=InventoryState(on_hand=2, on_order=0)), 0): -22.98938552312266, (NonTerminal(state=InventoryState(on_hand=2, on_order=0)), 1): -20.84338106185867, (NonTerminal(state=InventoryState(on_hand=2, on_order=0)), 2): -21.22848372377584, (NonTerminal(state=InventoryState(on_hand=2, on_order=0)), 3): -22.62627192946876, (NonTerminal(state=InventoryState(on_hand=2, on_order=1)), 0): -22.12797150580425, (NonTerminal(state=InventoryState(on_hand=2, on_order=1)), 1): -21.995874198463067, (NonTerminal(state=InventoryState(on_hand=2, on_order=1)), 2): -22.86076952824054, (NonTerminal(state=InventoryState(on_hand=2, on_order=2)), 0): -22.875950561803087, (NonTerminal(state=InventoryState(on_hand=2, on_order=2)), 1): -23.951456599301213, (NonTerminal(state=InventoryState(on_hand=2, on_order=3)), 0): -24.787545606776312, (NonTerminal(state=InventoryState(on_hand=3, on_order=0)), 0): -23.25372253651443, (NonTerminal(state=InventoryState(on_hand=3, on_order=0)), 1): -22.929466105679385, (NonTerminal(state=InventoryState(on_hand=3, on_order=0)), 2): -24.009915686734374, (NonTerminal(state=InventoryState(on_hand=3, on_order=1)), 0): -24.078312289662236, (NonTerminal(state=InventoryState(on_hand=3, on_order=1)), 1): -24.9649236826972, (NonTerminal(state=InventoryState(on_hand=3, on_order=2)), 0): -26.058681205609766, (NonTerminal(state=InventoryState(on_hand=4, on_order=0)), 0): -25.071399529390735, (NonTerminal(state=InventoryState(on_hand=4, on_order=0)), 1): -26.20134809299714, (NonTerminal(state=InventoryState(on_hand=4, on_order=1)), 0): -26.853538764992972, (NonTerminal(state=InventoryState(on_hand=5, on_order=0)), 0): -27.74356947452911}, counts_map={(NonTerminal(state=InventoryState(on_hand=2, on_order=2)), 0): 13484, (NonTerminal(state=InventoryState(on_hand=4, on_order=0)), 0): 68826, (NonTerminal(state=InventoryState(on_hand=3, on_order=0)), 0): 28352, (NonTerminal(state=InventoryState(on_hand=0, on_order=0)), 0): 647, (NonTerminal(state=InventoryState(on_hand=0, on_order=0)), 1): 710, (NonTerminal(state=InventoryState(on_hand=0, on_order=1)), 4): 3568, (NonTerminal(state=InventoryState(on_hand=1, on_order=4)), 0): 2312, (NonTerminal(state=InventoryState(on_hand=3, on_order=0)), 1): 69916, (NonTerminal(state=InventoryState(on_hand=2, on_order=1)), 2): 11761, (NonTerminal(state=InventoryState(on_hand=2, on_order=2)), 1): 1734, (NonTerminal(state=InventoryState(on_hand=4, on_order=1)), 0): 7998, (NonTerminal(state=InventoryState(on_hand=3, on_order=0)), 2): 7351, (NonTerminal(state=InventoryState(on_hand=3, on_order=2)), 0): 8904, (NonTerminal(state=InventoryState(on_hand=1, on_order=1)), 0): 6761, (NonTerminal(state=InventoryState(on_hand=2, on_order=0)), 0): 3933, (NonTerminal(state=InventoryState(on_hand=2, on_order=0)), 1): 62531, (NonTerminal(state=InventoryState(on_hand=2, on_order=1)), 0): 52241, (NonTerminal(state=InventoryState(on_hand=2, on_order=0)), 2): 4399, (NonTerminal(state=InventoryState(on_hand=3, on_order=1)), 0): 76320, (NonTerminal(state=InventoryState(on_hand=4, on_order=0)), 1): 8234, (NonTerminal(state=InventoryState(on_hand=3, on_order=1)), 1): 9045, (NonTerminal(state=InventoryState(on_hand=2, on_order=1)), 1): 107533, (NonTerminal(state=InventoryState(on_hand=1, on_order=1)), 2): 7817, (NonTerminal(state=InventoryState(on_hand=1, on_order=2)), 0): 13653, (NonTerminal(state=InventoryState(on_hand=5, on_order=0)), 0): 15678, (NonTerminal(state=InventoryState(on_hand=2, on_order=0)), 3): 3882, (NonTerminal(state=InventoryState(on_hand=2, on_order=3)), 0): 6015, (NonTerminal(state=InventoryState(on_hand=0, on_order=1)), 0): 3486, (NonTerminal(state=InventoryState(on_hand=1, on_order=0)), 0): 1423, (NonTerminal(state=InventoryState(on_hand=0, on_order=0)), 2): 15780, (NonTerminal(state=InventoryState(on_hand=0, on_order=2)), 0): 4337, (NonTerminal(state=InventoryState(on_hand=1, on_order=3)), 1): 910, (NonTerminal(state=InventoryState(on_hand=1, on_order=0)), 1): 2511, (NonTerminal(state=InventoryState(on_hand=1, on_order=1)), 1): 111605, (NonTerminal(state=InventoryState(on_hand=1, on_order=1)), 3): 6713, (NonTerminal(state=InventoryState(on_hand=1, on_order=3)), 0): 6805, (NonTerminal(state=InventoryState(on_hand=1, on_order=0)), 2): 28968, (NonTerminal(state=InventoryState(on_hand=0, on_order=2)), 1): 71569, (NonTerminal(state=InventoryState(on_hand=0, on_order=0)), 3): 764, (NonTerminal(state=InventoryState(on_hand=0, on_order=3)), 0): 2557, (NonTerminal(state=InventoryState(on_hand=0, on_order=1)), 1): 5372, (NonTerminal(state=InventoryState(on_hand=0, on_order=1)), 2): 71357, (NonTerminal(state=InventoryState(on_hand=0, on_order=0)), 4): 697, (NonTerminal(state=InventoryState(on_hand=0, on_order=4)), 0): 3802, (NonTerminal(state=InventoryState(on_hand=1, on_order=0)), 3): 1516, (NonTerminal(state=InventoryState(on_hand=0, on_order=3)), 1): 5035, (NonTerminal(state=InventoryState(on_hand=0, on_order=0)), 5): 674, (NonTerminal(state=InventoryState(on_hand=0, on_order=5)), 0): 1114, (NonTerminal(state=InventoryState(on_hand=1, on_order=0)), 4): 1541, (NonTerminal(state=InventoryState(on_hand=1, on_order=2)), 1): 30459, (NonTerminal(state=InventoryState(on_hand=0, on_order=2)), 2): 5026, (NonTerminal(state=InventoryState(on_hand=0, on_order=1)), 3): 3551, (NonTerminal(state=InventoryState(on_hand=0, on_order=3)), 2): 665, (NonTerminal(state=InventoryState(on_hand=0, on_order=4)), 1): 585, (NonTerminal(state=InventoryState(on_hand=0, on_order=2)), 3): 4299, (NonTerminal(state=InventoryState(on_hand=1, on_order=2)), 2): 3273}, count_to_weight_func=<function learning_rate_schedule.<locals>.lr_func at 0x7fcccc7f45f0>)def get_vf_and_policy_from_qvf(
mdp: FiniteMarkovDecisionProcess[S, A],
qvf: QValueFunctionApprox[S, A]
) -> Tuple[V[S], FiniteDeterministicPolicy[S, A]]:
opt_vf: V[S] = {
s: max(qvf((s, a)) for a in mdp.actions(s))
for s in mdp.non_terminal_states
}
opt_policy: FiniteDeterministicPolicy[S, A] = \
FiniteDeterministicPolicy({
s.state: qvf.argmax((s, a) for a in mdp.actions(s))[1]
for s in mdp.non_terminal_states
})
return opt_vf, opt_policyopt_svf, opt_pol = get_vf_and_policy_from_qvf(
mdp=si_mdp,
qvf=final_qvfa
)print(f"TD (Q-Learning) Optimal Value Function with {n_updates:d} updates")
pprint(opt_svf)TD (Q-Learning) Optimal Value Function with 1000000 updates
{NonTerminal(state=InventoryState(on_hand=0, on_order=0)): -26.963364564912712,
NonTerminal(state=InventoryState(on_hand=0, on_order=1)): -19.950928140606013,
NonTerminal(state=InventoryState(on_hand=0, on_order=2)): -18.893096534914584,
NonTerminal(state=InventoryState(on_hand=0, on_order=3)): -19.766811430911748,
NonTerminal(state=InventoryState(on_hand=0, on_order=4)): -20.74205917979043,
NonTerminal(state=InventoryState(on_hand=0, on_order=5)): -23.397969626596268,
NonTerminal(state=InventoryState(on_hand=1, on_order=0)): -21.099163467139114,
NonTerminal(state=InventoryState(on_hand=1, on_order=1)): -19.82044156219879,
NonTerminal(state=InventoryState(on_hand=1, on_order=2)): -20.84792154775406,
NonTerminal(state=InventoryState(on_hand=1, on_order=3)): -21.83612334536198,
NonTerminal(state=InventoryState(on_hand=1, on_order=4)): -24.259325423298947,
NonTerminal(state=InventoryState(on_hand=2, on_order=0)): -20.84338106185867,
NonTerminal(state=InventoryState(on_hand=2, on_order=1)): -21.995874198463067,
NonTerminal(state=InventoryState(on_hand=2, on_order=2)): -22.875950561803087,
NonTerminal(state=InventoryState(on_hand=2, on_order=3)): -24.787545606776312,
NonTerminal(state=InventoryState(on_hand=3, on_order=0)): -22.929466105679385,
NonTerminal(state=InventoryState(on_hand=3, on_order=1)): -24.078312289662236,
NonTerminal(state=InventoryState(on_hand=3, on_order=2)): -26.058681205609766,
NonTerminal(state=InventoryState(on_hand=4, on_order=0)): -25.071399529390735,
NonTerminal(state=InventoryState(on_hand=4, on_order=1)): -26.853538764992972,
NonTerminal(state=InventoryState(on_hand=5, on_order=0)): -27.74356947452911}print(f"TD (Q-Learning) Optimal Policy with {n_updates:d} updates")
pprint(opt_pol)TD (Q-Learning) Optimal Policy with 1000000 updates
For State InventoryState(on_hand=0, on_order=0): Do Action 2
For State InventoryState(on_hand=0, on_order=1): Do Action 2
For State InventoryState(on_hand=0, on_order=2): Do Action 1
For State InventoryState(on_hand=0, on_order=3): Do Action 1
For State InventoryState(on_hand=0, on_order=4): Do Action 0
For State InventoryState(on_hand=0, on_order=5): Do Action 0
For State InventoryState(on_hand=1, on_order=0): Do Action 2
For State InventoryState(on_hand=1, on_order=1): Do Action 1
For State InventoryState(on_hand=1, on_order=2): Do Action 1
For State InventoryState(on_hand=1, on_order=3): Do Action 0
For State InventoryState(on_hand=1, on_order=4): Do Action 0
For State InventoryState(on_hand=2, on_order=0): Do Action 1
For State InventoryState(on_hand=2, on_order=1): Do Action 1
For State InventoryState(on_hand=2, on_order=2): Do Action 0
For State InventoryState(on_hand=2, on_order=3): Do Action 0
For State InventoryState(on_hand=3, on_order=0): Do Action 1
For State InventoryState(on_hand=3, on_order=1): Do Action 0
For State InventoryState(on_hand=3, on_order=2): Do Action 0
For State InventoryState(on_hand=4, on_order=0): Do Action 0
For State InventoryState(on_hand=4, on_order=1): Do Action 0
For State InventoryState(on_hand=5, on_order=0): Do Action 0
For comparison, we run a Value Iteration to find the true Optimal Value Function and Optimal Policy.
true_opt_svf, true_opt_pol = value_iteration_result(mdp=si_mdp, gamma=gamma)print("True Optimal State Value Function")
pprint(true_opt_svf)True Optimal State Value Function
{NonTerminal(state=InventoryState(on_hand=0, on_order=0)): -26.98163492786722,
NonTerminal(state=InventoryState(on_hand=0, on_order=1)): -19.9909558006178,
NonTerminal(state=InventoryState(on_hand=0, on_order=2)): -18.86849301795165,
NonTerminal(state=InventoryState(on_hand=0, on_order=3)): -19.934022635857023,
NonTerminal(state=InventoryState(on_hand=0, on_order=4)): -20.91848526863397,
NonTerminal(state=InventoryState(on_hand=0, on_order=5)): -22.77205311116058,
NonTerminal(state=InventoryState(on_hand=1, on_order=0)): -20.9909558006178,
NonTerminal(state=InventoryState(on_hand=1, on_order=1)): -19.86849301795165,
NonTerminal(state=InventoryState(on_hand=1, on_order=2)): -20.934022635857026,
NonTerminal(state=InventoryState(on_hand=1, on_order=3)): -21.918485268633972,
NonTerminal(state=InventoryState(on_hand=1, on_order=4)): -23.77205311116058,
NonTerminal(state=InventoryState(on_hand=2, on_order=0)): -20.86849301795165,
NonTerminal(state=InventoryState(on_hand=2, on_order=1)): -21.934022635857023,
NonTerminal(state=InventoryState(on_hand=2, on_order=2)): -22.91848526863397,
NonTerminal(state=InventoryState(on_hand=2, on_order=3)): -24.77205311116058,
NonTerminal(state=InventoryState(on_hand=3, on_order=0)): -22.934022635857026,
NonTerminal(state=InventoryState(on_hand=3, on_order=1)): -23.918485268633972,
NonTerminal(state=InventoryState(on_hand=3, on_order=2)): -25.772053111160584,
NonTerminal(state=InventoryState(on_hand=4, on_order=0)): -24.91848526863397,
NonTerminal(state=InventoryState(on_hand=4, on_order=1)): -26.772053111160577,
NonTerminal(state=InventoryState(on_hand=5, on_order=0)): -27.772053111160577}print("True Optimal Policy")
pprint(true_opt_pol)True Optimal Policy
For State InventoryState(on_hand=0, on_order=0): Do Action 2
For State InventoryState(on_hand=0, on_order=1): Do Action 2
For State InventoryState(on_hand=0, on_order=2): Do Action 1
For State InventoryState(on_hand=0, on_order=3): Do Action 1
For State InventoryState(on_hand=0, on_order=4): Do Action 0
For State InventoryState(on_hand=0, on_order=5): Do Action 0
For State InventoryState(on_hand=1, on_order=0): Do Action 2
For State InventoryState(on_hand=1, on_order=1): Do Action 1
For State InventoryState(on_hand=1, on_order=2): Do Action 1
For State InventoryState(on_hand=1, on_order=3): Do Action 0
For State InventoryState(on_hand=1, on_order=4): Do Action 0
For State InventoryState(on_hand=2, on_order=0): Do Action 1
For State InventoryState(on_hand=2, on_order=1): Do Action 1
For State InventoryState(on_hand=2, on_order=2): Do Action 0
For State InventoryState(on_hand=2, on_order=3): Do Action 0
For State InventoryState(on_hand=3, on_order=0): Do Action 1
For State InventoryState(on_hand=3, on_order=1): Do Action 0
For State InventoryState(on_hand=3, on_order=2): Do Action 0
For State InventoryState(on_hand=4, on_order=0): Do Action 0
For State InventoryState(on_hand=4, on_order=1): Do Action 0
For State InventoryState(on_hand=5, on_order=0): Do Action 0
Now we compare values by state for the State Value Function
[(true_opt_svf[s], opt_svf[s]) for s in si_mdp.non_terminal_states][(-26.98163492786722, -26.963364564912712),
(-19.9909558006178, -19.950928140606013),
(-18.86849301795165, -18.893096534914584),
(-19.934022635857023, -19.766811430911748),
(-20.91848526863397, -20.74205917979043),
(-22.77205311116058, -23.397969626596268),
(-20.9909558006178, -21.099163467139114),
(-19.86849301795165, -19.82044156219879),
(-20.934022635857026, -20.84792154775406),
(-21.918485268633972, -21.83612334536198),
(-23.77205311116058, -24.259325423298947),
(-20.86849301795165, -20.84338106185867),
(-21.934022635857023, -21.995874198463067),
(-22.91848526863397, -22.875950561803087),
(-24.77205311116058, -24.787545606776312),
(-22.934022635857026, -22.929466105679385),
(-23.918485268633972, -24.078312289662236),
(-25.772053111160584, -26.058681205609766),
(-24.91848526863397, -25.071399529390735),
(-26.772053111160577, -26.853538764992972),
(-27.772053111160577, -27.74356947452911)]We also compare values by state for the Policy
[(true_opt_pol.policy_map[s.state], opt_pol.policy_map[s.state]) for s in si_mdp.non_terminal_states][(Constant(value=2), Constant(value=2)),
(Constant(value=2), Constant(value=2)),
(Constant(value=1), Constant(value=1)),
(Constant(value=1), Constant(value=1)),
(Constant(value=0), Constant(value=0)),
(Constant(value=0), Constant(value=0)),
(Constant(value=2), Constant(value=2)),
(Constant(value=1), Constant(value=1)),
(Constant(value=1), Constant(value=1)),
(Constant(value=0), Constant(value=0)),
(Constant(value=0), Constant(value=0)),
(Constant(value=1), Constant(value=1)),
(Constant(value=1), Constant(value=1)),
(Constant(value=0), Constant(value=0)),
(Constant(value=0), Constant(value=0)),
(Constant(value=1), Constant(value=1)),
(Constant(value=0), Constant(value=0)),
(Constant(value=0), Constant(value=0)),
(Constant(value=0), Constant(value=0)),
(Constant(value=0), Constant(value=0)),
(Constant(value=0), Constant(value=0))]Let us visualize the convergence of the Action Value Function (Q) for each of the states:
qvfa_lst[10]Tabular(values_map={(NonTerminal(state=InventoryState(on_hand=0, on_order=0)), 0): -1.0, (NonTerminal(state=InventoryState(on_hand=0, on_order=0)), 1): -1.0, (NonTerminal(state=InventoryState(on_hand=0, on_order=0)), 2): 0.0, (NonTerminal(state=InventoryState(on_hand=0, on_order=0)), 3): 0.0, (NonTerminal(state=InventoryState(on_hand=0, on_order=0)), 4): 0.0, (NonTerminal(state=InventoryState(on_hand=0, on_order=0)), 5): 0.0, (NonTerminal(state=InventoryState(on_hand=0, on_order=1)), 0): 0.0, (NonTerminal(state=InventoryState(on_hand=0, on_order=1)), 1): 0.0, (NonTerminal(state=InventoryState(on_hand=0, on_order=1)), 2): 0.0, (NonTerminal(state=InventoryState(on_hand=0, on_order=1)), 3): 0.0, (NonTerminal(state=InventoryState(on_hand=0, on_order=1)), 4): 0.0, (NonTerminal(state=InventoryState(on_hand=0, on_order=2)), 0): 0.0, (NonTerminal(state=InventoryState(on_hand=0, on_order=2)), 1): 0.0, (NonTerminal(state=InventoryState(on_hand=0, on_order=2)), 2): 0.0, (NonTerminal(state=InventoryState(on_hand=0, on_order=2)), 3): 0.0, (NonTerminal(state=InventoryState(on_hand=0, on_order=3)), 0): 0.0, (NonTerminal(state=InventoryState(on_hand=0, on_order=3)), 1): 0.0, (NonTerminal(state=InventoryState(on_hand=0, on_order=3)), 2): 0.0, (NonTerminal(state=InventoryState(on_hand=0, on_order=4)), 0): 0.0, (NonTerminal(state=InventoryState(on_hand=0, on_order=4)), 1): 0.0, (NonTerminal(state=InventoryState(on_hand=0, on_order=5)), 0): 0.0, (NonTerminal(state=InventoryState(on_hand=1, on_order=0)), 0): 0.0, (NonTerminal(state=InventoryState(on_hand=1, on_order=0)), 1): 0.0, (NonTerminal(state=InventoryState(on_hand=1, on_order=0)), 2): 0.0, (NonTerminal(state=InventoryState(on_hand=1, on_order=0)), 3): 0.0, (NonTerminal(state=InventoryState(on_hand=1, on_order=0)), 4): 0.0, (NonTerminal(state=InventoryState(on_hand=1, on_order=1)), 0): 0.0, (NonTerminal(state=InventoryState(on_hand=1, on_order=1)), 1): 0.0, (NonTerminal(state=InventoryState(on_hand=1, on_order=1)), 2): 0.0, (NonTerminal(state=InventoryState(on_hand=1, on_order=1)), 3): 0.0, (NonTerminal(state=InventoryState(on_hand=1, on_order=2)), 0): 0.0, (NonTerminal(state=InventoryState(on_hand=1, on_order=2)), 1): 0.0, (NonTerminal(state=InventoryState(on_hand=1, on_order=2)), 2): 0.0, (NonTerminal(state=InventoryState(on_hand=1, on_order=3)), 0): 0.0, (NonTerminal(state=InventoryState(on_hand=1, on_order=3)), 1): 0.0, (NonTerminal(state=InventoryState(on_hand=1, on_order=4)), 0): -0.1, (NonTerminal(state=InventoryState(on_hand=2, on_order=0)), 0): 0.0, (NonTerminal(state=InventoryState(on_hand=2, on_order=0)), 1): 0.0, (NonTerminal(state=InventoryState(on_hand=2, on_order=0)), 2): 0.0, (NonTerminal(state=InventoryState(on_hand=2, on_order=0)), 3): 0.0, (NonTerminal(state=InventoryState(on_hand=2, on_order=1)), 0): 0.0, (NonTerminal(state=InventoryState(on_hand=2, on_order=1)), 1): 0.0, (NonTerminal(state=InventoryState(on_hand=2, on_order=1)), 2): -0.2, (NonTerminal(state=InventoryState(on_hand=2, on_order=2)), 0): -0.2, (NonTerminal(state=InventoryState(on_hand=2, on_order=2)), 1): -0.2, (NonTerminal(state=InventoryState(on_hand=2, on_order=3)), 0): 0.0, (NonTerminal(state=InventoryState(on_hand=3, on_order=0)), 0): -0.3233369264429329, (NonTerminal(state=InventoryState(on_hand=3, on_order=0)), 1): -0.30000000000000004, (NonTerminal(state=InventoryState(on_hand=3, on_order=0)), 2): 0.0, (NonTerminal(state=InventoryState(on_hand=3, on_order=1)), 0): 0.0, (NonTerminal(state=InventoryState(on_hand=3, on_order=1)), 1): 0.0, (NonTerminal(state=InventoryState(on_hand=3, on_order=2)), 0): 0.0, (NonTerminal(state=InventoryState(on_hand=4, on_order=0)), 0): -0.4, (NonTerminal(state=InventoryState(on_hand=4, on_order=0)), 1): 0.0, (NonTerminal(state=InventoryState(on_hand=4, on_order=1)), 0): 0.0, (NonTerminal(state=InventoryState(on_hand=5, on_order=0)), 0): 0.0}, counts_map={(NonTerminal(state=InventoryState(on_hand=2, on_order=2)), 0): 1, (NonTerminal(state=InventoryState(on_hand=4, on_order=0)), 0): 1, (NonTerminal(state=InventoryState(on_hand=3, on_order=0)), 0): 1, (NonTerminal(state=InventoryState(on_hand=0, on_order=0)), 0): 1, (NonTerminal(state=InventoryState(on_hand=0, on_order=0)), 1): 1, (NonTerminal(state=InventoryState(on_hand=0, on_order=1)), 4): 1, (NonTerminal(state=InventoryState(on_hand=1, on_order=4)), 0): 1, (NonTerminal(state=InventoryState(on_hand=3, on_order=0)), 1): 1, (NonTerminal(state=InventoryState(on_hand=2, on_order=1)), 2): 1, (NonTerminal(state=InventoryState(on_hand=2, on_order=2)), 1): 1}, count_to_weight_func=<function learning_rate_schedule.<locals>.lr_func at 0x7fcccc7f45f0>)qvfa_lst[10].values_map{(NonTerminal(state=InventoryState(on_hand=0, on_order=0)), 0): -1.0,
(NonTerminal(state=InventoryState(on_hand=0, on_order=0)), 1): -1.0,
(NonTerminal(state=InventoryState(on_hand=0, on_order=0)), 2): 0.0,
(NonTerminal(state=InventoryState(on_hand=0, on_order=0)), 3): 0.0,
(NonTerminal(state=InventoryState(on_hand=0, on_order=0)), 4): 0.0,
(NonTerminal(state=InventoryState(on_hand=0, on_order=0)), 5): 0.0,
(NonTerminal(state=InventoryState(on_hand=0, on_order=1)), 0): 0.0,
(NonTerminal(state=InventoryState(on_hand=0, on_order=1)), 1): 0.0,
(NonTerminal(state=InventoryState(on_hand=0, on_order=1)), 2): 0.0,
(NonTerminal(state=InventoryState(on_hand=0, on_order=1)), 3): 0.0,
(NonTerminal(state=InventoryState(on_hand=0, on_order=1)), 4): 0.0,
(NonTerminal(state=InventoryState(on_hand=0, on_order=2)), 0): 0.0,
(NonTerminal(state=InventoryState(on_hand=0, on_order=2)), 1): 0.0,
(NonTerminal(state=InventoryState(on_hand=0, on_order=2)), 2): 0.0,
(NonTerminal(state=InventoryState(on_hand=0, on_order=2)), 3): 0.0,
(NonTerminal(state=InventoryState(on_hand=0, on_order=3)), 0): 0.0,
(NonTerminal(state=InventoryState(on_hand=0, on_order=3)), 1): 0.0,
(NonTerminal(state=InventoryState(on_hand=0, on_order=3)), 2): 0.0,
(NonTerminal(state=InventoryState(on_hand=0, on_order=4)), 0): 0.0,
(NonTerminal(state=InventoryState(on_hand=0, on_order=4)), 1): 0.0,
(NonTerminal(state=InventoryState(on_hand=0, on_order=5)), 0): 0.0,
(NonTerminal(state=InventoryState(on_hand=1, on_order=0)), 0): 0.0,
(NonTerminal(state=InventoryState(on_hand=1, on_order=0)), 1): 0.0,
(NonTerminal(state=InventoryState(on_hand=1, on_order=0)), 2): 0.0,
(NonTerminal(state=InventoryState(on_hand=1, on_order=0)), 3): 0.0,
(NonTerminal(state=InventoryState(on_hand=1, on_order=0)), 4): 0.0,
(NonTerminal(state=InventoryState(on_hand=1, on_order=1)), 0): 0.0,
(NonTerminal(state=InventoryState(on_hand=1, on_order=1)), 1): 0.0,
(NonTerminal(state=InventoryState(on_hand=1, on_order=1)), 2): 0.0,
(NonTerminal(state=InventoryState(on_hand=1, on_order=1)), 3): 0.0,
(NonTerminal(state=InventoryState(on_hand=1, on_order=2)), 0): 0.0,
(NonTerminal(state=InventoryState(on_hand=1, on_order=2)), 1): 0.0,
(NonTerminal(state=InventoryState(on_hand=1, on_order=2)), 2): 0.0,
(NonTerminal(state=InventoryState(on_hand=1, on_order=3)), 0): 0.0,
(NonTerminal(state=InventoryState(on_hand=1, on_order=3)), 1): 0.0,
(NonTerminal(state=InventoryState(on_hand=1, on_order=4)), 0): -0.1,
(NonTerminal(state=InventoryState(on_hand=2, on_order=0)), 0): 0.0,
(NonTerminal(state=InventoryState(on_hand=2, on_order=0)), 1): 0.0,
(NonTerminal(state=InventoryState(on_hand=2, on_order=0)), 2): 0.0,
(NonTerminal(state=InventoryState(on_hand=2, on_order=0)), 3): 0.0,
(NonTerminal(state=InventoryState(on_hand=2, on_order=1)), 0): 0.0,
(NonTerminal(state=InventoryState(on_hand=2, on_order=1)), 1): 0.0,
(NonTerminal(state=InventoryState(on_hand=2, on_order=1)), 2): -0.2,
(NonTerminal(state=InventoryState(on_hand=2, on_order=2)), 0): -0.2,
(NonTerminal(state=InventoryState(on_hand=2, on_order=2)), 1): -0.2,
(NonTerminal(state=InventoryState(on_hand=2, on_order=3)), 0): 0.0,
(NonTerminal(state=InventoryState(on_hand=3, on_order=0)),
0): -0.3233369264429329,
(NonTerminal(state=InventoryState(on_hand=3, on_order=0)),
1): -0.30000000000000004,
(NonTerminal(state=InventoryState(on_hand=3, on_order=0)), 2): 0.0,
(NonTerminal(state=InventoryState(on_hand=3, on_order=1)), 0): 0.0,
(NonTerminal(state=InventoryState(on_hand=3, on_order=1)), 1): 0.0,
(NonTerminal(state=InventoryState(on_hand=3, on_order=2)), 0): 0.0,
(NonTerminal(state=InventoryState(on_hand=4, on_order=0)), 0): -0.4,
(NonTerminal(state=InventoryState(on_hand=4, on_order=0)), 1): 0.0,
(NonTerminal(state=InventoryState(on_hand=4, on_order=1)), 0): 0.0,
(NonTerminal(state=InventoryState(on_hand=5, on_order=0)), 0): 0.0}qvfa_lst[10].counts_map{(NonTerminal(state=InventoryState(on_hand=2, on_order=2)), 0): 1,
(NonTerminal(state=InventoryState(on_hand=4, on_order=0)), 0): 1,
(NonTerminal(state=InventoryState(on_hand=3, on_order=0)), 0): 1,
(NonTerminal(state=InventoryState(on_hand=0, on_order=0)), 0): 1,
(NonTerminal(state=InventoryState(on_hand=0, on_order=0)), 1): 1,
(NonTerminal(state=InventoryState(on_hand=0, on_order=1)), 4): 1,
(NonTerminal(state=InventoryState(on_hand=1, on_order=4)), 0): 1,
(NonTerminal(state=InventoryState(on_hand=3, on_order=0)), 1): 1,
(NonTerminal(state=InventoryState(on_hand=2, on_order=1)), 2): 1,
(NonTerminal(state=InventoryState(on_hand=2, on_order=2)), 1): 1}Let us visualize how the Action Value Function for each (state, action) pair converges during the operation of the Monte-Carlo algorithm.
values_dicts = [(vfa.values_map) for vfa in qvfa_lst]
# values_dicts# https://stackoverflow.com/questions/5946236/how-to-merge-dicts-collecting-values-from-matching-keys
from collections import defaultdict
ds = values_dicts
merged_dict = defaultdict(list)
for d in ds: #input dicts
for key, value in d.items():
merged_dict[key].append(value)
# merged_dictlen(merged_dict)56import matplotlib.pyplot as plt
fig,axs = plt.subplots(figsize=(13,10))
axs.set_xlabel('Iterations', fontsize=20)
axs.set_title(f'Convergence of action value functions during Q-Learning', fontsize=24)
for it in merged_dict.items():
axs.plot(it[1], label=f'{it[0][0].state}, {it[0][1]}')
# axs.legend(fontsize=15);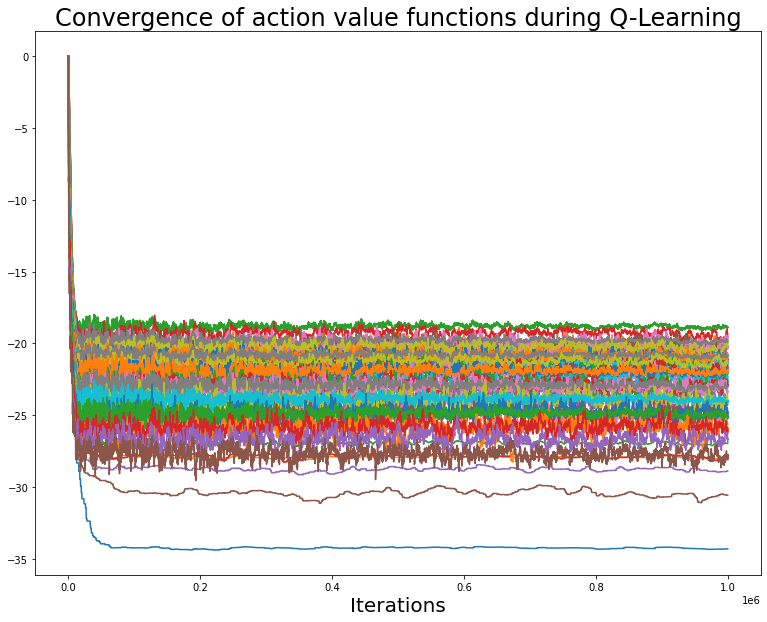
import numpy as npprint('capacity =', capacity)
print('poisson_lambda =', poisson_lambda)
print('holding_cost =', holding_cost)
print('stockout_cost =', stockout_cost)
print('gamma =', gamma)capacity = 5
poisson_lambda = 1.0
holding_cost = 1.0
stockout_cost = 10.0
gamma = 0.9n_steps = 2_000 #number of simulation stepsclass SimpleInventoryDeterministicPolicy(DeterministicPolicy[InventoryState, int]):
def __init__(self, reorder_point: int):
self.reorder_point: int = reorder_point
def action_for(s: InventoryState) -> int:
return max(self.reorder_point - s.inventory_position(), 0)
super().__init__(action_for)#
# start state distribution
ssd = Choose(si_mdp.non_terminal_states)
# ssd\(\theta = \text{max}(r - (\alpha + \beta), 0)\)
where: - \(\theta \in \mathbb Z_{\ge0}\) is the order quantity - \(r \in \mathbb Z_{\ge0}\) is the reorder point below which reordering is allowed. - \(\alpha\) is the on-hand inventory - \(\beta\) is the on-order inventory - \((\alpha,\beta)\) is the state
We set \(r = C\) where \(C\) is the inventory capacity for the item.
reorder_point_pol_1 = capacity; reorder_point_pol_15pol_1 = SimpleInventoryDeterministicPolicy(reorder_point=reorder_point_pol_1); pol_1SimpleInventoryDeterministicPolicy(action_for=<function SimpleInventoryDeterministicPolicy.__init__.<locals>.action_for at 0x7fcccc7f4d40>)step_gen = si_mdp.simulate_action(
start_state_distribution=ssd,
policy=pol_1) step_lst = list(itertools.islice(step_gen, n_steps))
pprint(step_lst[:5])[TransitionStep(state=NonTerminal(state=InventoryState(on_hand=4, on_order=1)), action=0, next_state=NonTerminal(state=InventoryState(on_hand=5, on_order=0)), reward=-4.0),
TransitionStep(state=NonTerminal(state=InventoryState(on_hand=5, on_order=0)), action=0, next_state=NonTerminal(state=InventoryState(on_hand=0, on_order=0)), reward=-5.006889227394354),
TransitionStep(state=NonTerminal(state=InventoryState(on_hand=0, on_order=0)), action=5, next_state=NonTerminal(state=InventoryState(on_hand=0, on_order=5)), reward=-10.0),
TransitionStep(state=NonTerminal(state=InventoryState(on_hand=0, on_order=5)), action=0, next_state=NonTerminal(state=InventoryState(on_hand=5, on_order=0)), reward=-0.0),
TransitionStep(state=NonTerminal(state=InventoryState(on_hand=5, on_order=0)), action=0, next_state=NonTerminal(state=InventoryState(on_hand=5, on_order=0)), reward=-5.0)]list_of_tuples = [((step.state.state.on_hand,step.state.state.on_order), step.action, (step.next_state.state.on_hand,step.next_state.state.on_order), step.reward) for step in step_lst]
# list_of_tuplesstates, actions, next_states, rewards = [list(tup) for tup in zip(*list_of_tuples)]cum_reward_pol_1 = np.cumsum(rewards)\(\theta = \text{max}(r - (\alpha + \beta), 0)\)
where: - \(\theta \in \mathbb Z_{\ge0}\) is the order quantity - \(r \in \mathbb Z_{\ge0}\) is the reorder point below which reordering is allowed. - \(\alpha\) is the on-hand inventory - \(\beta\) is the on-order inventory - \((\alpha,\beta)\) is the state
We set \(r = 1\).
reorder_point_pol_2 = 1; reorder_point_pol_21pol_2 = SimpleInventoryDeterministicPolicy(reorder_point=reorder_point_pol_2); pol_2SimpleInventoryDeterministicPolicy(action_for=<function SimpleInventoryDeterministicPolicy.__init__.<locals>.action_for at 0x7fcccc7e9b90>)step_gen = si_mdp.simulate_action(
start_state_distribution=ssd,
policy=pol_2) step_lst = list(itertools.islice(step_gen, n_steps))
pprint(step_lst[:5])[TransitionStep(state=NonTerminal(state=InventoryState(on_hand=0, on_order=0)), action=1, next_state=NonTerminal(state=InventoryState(on_hand=0, on_order=1)), reward=-10.0),
TransitionStep(state=NonTerminal(state=InventoryState(on_hand=0, on_order=1)), action=0, next_state=NonTerminal(state=InventoryState(on_hand=0, on_order=0)), reward=-3.6787944117144233),
TransitionStep(state=NonTerminal(state=InventoryState(on_hand=0, on_order=0)), action=1, next_state=NonTerminal(state=InventoryState(on_hand=0, on_order=1)), reward=-10.0),
TransitionStep(state=NonTerminal(state=InventoryState(on_hand=0, on_order=1)), action=0, next_state=NonTerminal(state=InventoryState(on_hand=0, on_order=0)), reward=-3.6787944117144233),
TransitionStep(state=NonTerminal(state=InventoryState(on_hand=0, on_order=0)), action=1, next_state=NonTerminal(state=InventoryState(on_hand=0, on_order=1)), reward=-10.0)]list_of_tuples = [((step.state.state.on_hand,step.state.state.on_order), step.action, (step.next_state.state.on_hand,step.next_state.state.on_order), step.reward) for step in step_lst]
# list_of_tuplesstates, actions, next_states, rewards = [list(tup) for tup in zip(*list_of_tuples)]cum_reward_pol_2 = np.cumsum(rewards)\(\theta = \text{max}(r - (\alpha + \beta), 0)\)
where: - \(\theta \in \mathbb Z_{\ge0}\) is the order quantity - \(r \in \mathbb Z_{\ge0}\) is the reorder point below which reordering is allowed. - \(\alpha\) is the on-hand inventory - \(\beta\) is the on-order inventory - \((\alpha,\beta)\) is the state
We set \(r = \frac{C}{2}\).
reorder_point_pol_3 = capacity//2; reorder_point_pol_32pol_3 = SimpleInventoryDeterministicPolicy(reorder_point=reorder_point_pol_3); pol_3SimpleInventoryDeterministicPolicy(action_for=<function SimpleInventoryDeterministicPolicy.__init__.<locals>.action_for at 0x7fcccc7e90e0>)step_gen = si_mdp.simulate_action(
start_state_distribution=ssd,
policy=pol_3) step_lst = list(itertools.islice(step_gen, n_steps))
pprint(step_lst[:5])[TransitionStep(state=NonTerminal(state=InventoryState(on_hand=1, on_order=3)), action=0, next_state=NonTerminal(state=InventoryState(on_hand=4, on_order=0)), reward=-1.0),
TransitionStep(state=NonTerminal(state=InventoryState(on_hand=4, on_order=0)), action=0, next_state=NonTerminal(state=InventoryState(on_hand=4, on_order=0)), reward=-4.0),
TransitionStep(state=NonTerminal(state=InventoryState(on_hand=4, on_order=0)), action=0, next_state=NonTerminal(state=InventoryState(on_hand=3, on_order=0)), reward=-4.0),
TransitionStep(state=NonTerminal(state=InventoryState(on_hand=3, on_order=0)), action=0, next_state=NonTerminal(state=InventoryState(on_hand=2, on_order=0)), reward=-3.0),
TransitionStep(state=NonTerminal(state=InventoryState(on_hand=2, on_order=0)), action=0, next_state=NonTerminal(state=InventoryState(on_hand=1, on_order=0)), reward=-2.0)]list_of_tuples = [((step.state.state.on_hand,step.state.state.on_order), step.action, (step.next_state.state.on_hand,step.next_state.state.on_order), step.reward) for step in step_lst]
# list_of_tuplesstates, actions, next_states, rewards = [list(tup) for tup in zip(*list_of_tuples)]cum_reward_pol_3 = np.cumsum(rewards)print(f"TD (Q-Learning) Optimal Policy with {n_updates:d} updates")
pprint(opt_pol)TD (Q-Learning) Optimal Policy with 1000000 updates
For State InventoryState(on_hand=0, on_order=0): Do Action 2
For State InventoryState(on_hand=0, on_order=1): Do Action 2
For State InventoryState(on_hand=0, on_order=2): Do Action 1
For State InventoryState(on_hand=0, on_order=3): Do Action 1
For State InventoryState(on_hand=0, on_order=4): Do Action 0
For State InventoryState(on_hand=0, on_order=5): Do Action 0
For State InventoryState(on_hand=1, on_order=0): Do Action 2
For State InventoryState(on_hand=1, on_order=1): Do Action 1
For State InventoryState(on_hand=1, on_order=2): Do Action 1
For State InventoryState(on_hand=1, on_order=3): Do Action 0
For State InventoryState(on_hand=1, on_order=4): Do Action 0
For State InventoryState(on_hand=2, on_order=0): Do Action 1
For State InventoryState(on_hand=2, on_order=1): Do Action 1
For State InventoryState(on_hand=2, on_order=2): Do Action 0
For State InventoryState(on_hand=2, on_order=3): Do Action 0
For State InventoryState(on_hand=3, on_order=0): Do Action 1
For State InventoryState(on_hand=3, on_order=1): Do Action 0
For State InventoryState(on_hand=3, on_order=2): Do Action 0
For State InventoryState(on_hand=4, on_order=0): Do Action 0
For State InventoryState(on_hand=4, on_order=1): Do Action 0
For State InventoryState(on_hand=5, on_order=0): Do Action 0
type(opt_pol)rl.policy_ANNO.FiniteDeterministicPolicystep_gen = si_mdp.simulate_action(
start_state_distribution=ssd,
policy=opt_pol) step_lst = list(itertools.islice(step_gen, n_steps))
pprint(step_lst[:5])[TransitionStep(state=NonTerminal(state=InventoryState(on_hand=0, on_order=2)), action=1, next_state=NonTerminal(state=InventoryState(on_hand=2, on_order=1)), reward=-0.0),
TransitionStep(state=NonTerminal(state=InventoryState(on_hand=2, on_order=1)), action=1, next_state=NonTerminal(state=InventoryState(on_hand=3, on_order=1)), reward=-2.0),
TransitionStep(state=NonTerminal(state=InventoryState(on_hand=3, on_order=1)), action=0, next_state=NonTerminal(state=InventoryState(on_hand=4, on_order=0)), reward=-3.0),
TransitionStep(state=NonTerminal(state=InventoryState(on_hand=4, on_order=0)), action=0, next_state=NonTerminal(state=InventoryState(on_hand=2, on_order=0)), reward=-4.0),
TransitionStep(state=NonTerminal(state=InventoryState(on_hand=2, on_order=0)), action=1, next_state=NonTerminal(state=InventoryState(on_hand=1, on_order=1)), reward=-2.0)]list_of_tuples = [((step.state.state.on_hand,step.state.state.on_order), step.action, (step.next_state.state.on_hand,step.next_state.state.on_order), step.reward) for step in step_lst]
# list_of_tuplesstates, actions, next_states, rewards = [list(tup) for tup in zip(*list_of_tuples)]cum_reward_pol_opt = np.cumsum(rewards)print(f"TD (Q-Learning) True Optimal Policy with {n_updates:d} updates")
pprint(true_opt_pol)TD (Q-Learning) True Optimal Policy with 1000000 updates
For State InventoryState(on_hand=0, on_order=0): Do Action 2
For State InventoryState(on_hand=0, on_order=1): Do Action 2
For State InventoryState(on_hand=0, on_order=2): Do Action 1
For State InventoryState(on_hand=0, on_order=3): Do Action 1
For State InventoryState(on_hand=0, on_order=4): Do Action 0
For State InventoryState(on_hand=0, on_order=5): Do Action 0
For State InventoryState(on_hand=1, on_order=0): Do Action 2
For State InventoryState(on_hand=1, on_order=1): Do Action 1
For State InventoryState(on_hand=1, on_order=2): Do Action 1
For State InventoryState(on_hand=1, on_order=3): Do Action 0
For State InventoryState(on_hand=1, on_order=4): Do Action 0
For State InventoryState(on_hand=2, on_order=0): Do Action 1
For State InventoryState(on_hand=2, on_order=1): Do Action 1
For State InventoryState(on_hand=2, on_order=2): Do Action 0
For State InventoryState(on_hand=2, on_order=3): Do Action 0
For State InventoryState(on_hand=3, on_order=0): Do Action 1
For State InventoryState(on_hand=3, on_order=1): Do Action 0
For State InventoryState(on_hand=3, on_order=2): Do Action 0
For State InventoryState(on_hand=4, on_order=0): Do Action 0
For State InventoryState(on_hand=4, on_order=1): Do Action 0
For State InventoryState(on_hand=5, on_order=0): Do Action 0
step_gen = si_mdp.simulate_action(
start_state_distribution=ssd,
policy=true_opt_pol)step_lst = list(itertools.islice(step_gen, n_steps))
pprint(step_lst[:5])[TransitionStep(state=NonTerminal(state=InventoryState(on_hand=2, on_order=1)), action=1, next_state=NonTerminal(state=InventoryState(on_hand=1, on_order=1)), reward=-2.0),
TransitionStep(state=NonTerminal(state=InventoryState(on_hand=1, on_order=1)), action=1, next_state=NonTerminal(state=InventoryState(on_hand=1, on_order=1)), reward=-1.0),
TransitionStep(state=NonTerminal(state=InventoryState(on_hand=1, on_order=1)), action=1, next_state=NonTerminal(state=InventoryState(on_hand=2, on_order=1)), reward=-1.0),
TransitionStep(state=NonTerminal(state=InventoryState(on_hand=2, on_order=1)), action=1, next_state=NonTerminal(state=InventoryState(on_hand=2, on_order=1)), reward=-2.0),
TransitionStep(state=NonTerminal(state=InventoryState(on_hand=2, on_order=1)), action=1, next_state=NonTerminal(state=InventoryState(on_hand=0, on_order=1)), reward=-2.2333692644293284)]list_of_tuples = [((step.state.state.on_hand,step.state.state.on_order), step.action, (step.next_state.state.on_hand,step.next_state.state.on_order), step.reward) for step in step_lst]
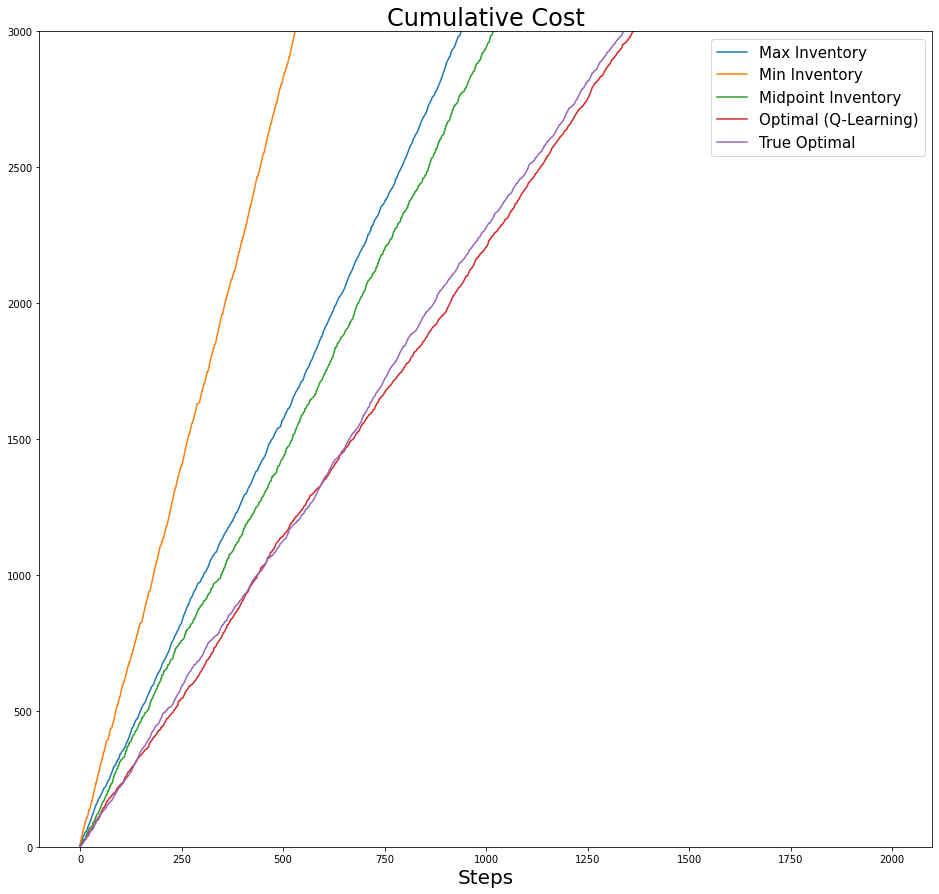
# list_of_tuplesstates, actions, next_states, rewards = [list(tup) for tup in zip(*list_of_tuples)]cum_reward_pol_opt_true = np.cumsum(rewards)label_list = ['Max Inventory', 'Min Inventory', 'Midpoint Inventory', 'Optimal (Q-Learning)', 'True Optimal']
plot_list = [cum_reward_pol_1, cum_reward_pol_2, cum_reward_pol_3, cum_reward_pol_opt, cum_reward_pol_opt_true]fig,axs = plt.subplots(figsize=(16,15))
axs.set_xlabel('Steps', fontsize=20)
axs.set_title(f'Cumulative Reward', fontsize=24)
for i,cum_r in enumerate(plot_list):
axs.plot(cum_r, label=label_list[i])
# axs.set_ylim([-5000,0])
axs.legend(fontsize=15);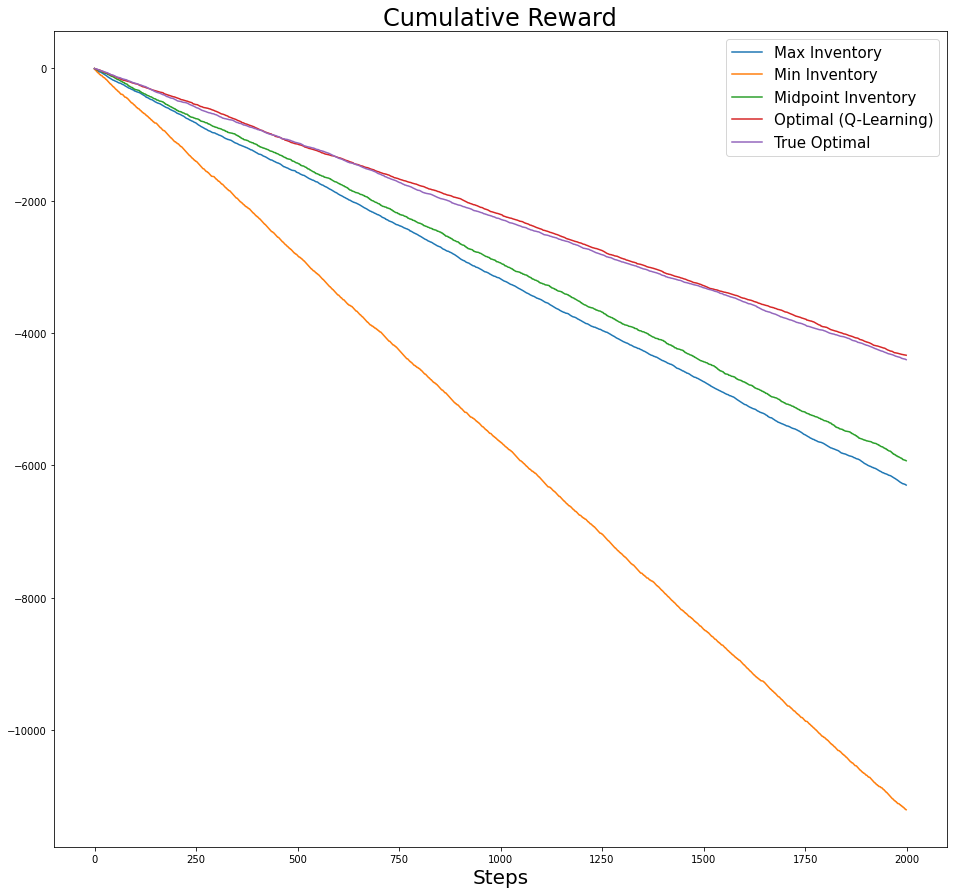
fig,axs = plt.subplots(figsize=(16,15))
axs.set_xlabel('Steps', fontsize=20)
axs.set_title(f'Cumulative Cost', fontsize=24)
for i,cum_r in enumerate(plot_list):
axs.plot(-cum_r, label=label_list[i])
# axs.set_ylim([0, 5000])
axs.legend(fontsize=15);
Now we zoom in a bit:
fig,axs = plt.subplots(figsize=(16,15))
axs.set_xlabel('Steps', fontsize=20)
axs.set_title(f'Cumulative Reward', fontsize=24)
for i,cum_r in enumerate(plot_list):
axs.plot(cum_r, label=label_list[i])
axs.set_ylim([-3000,0])
axs.legend(fontsize=15);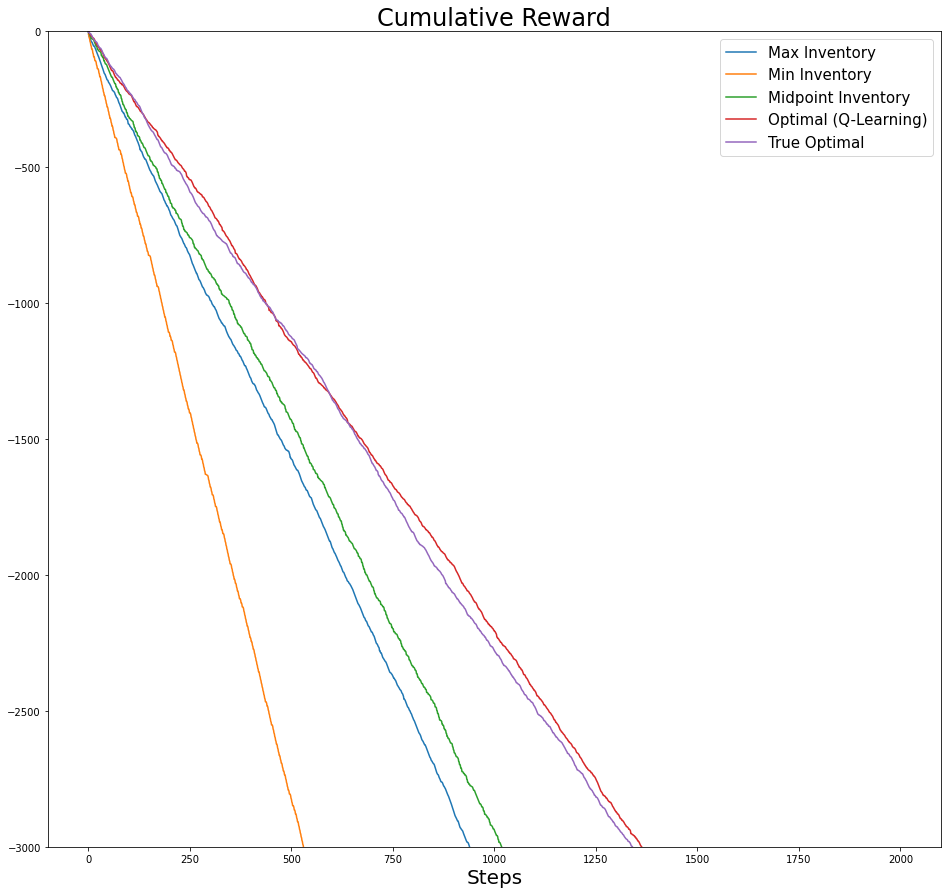
fig,axs = plt.subplots(figsize=(16,15))
axs.set_xlabel('Steps', fontsize=20)
axs.set_title(f'Cumulative Cost', fontsize=24)
for i,cum_r in enumerate(plot_list):
axs.plot(-cum_r, label=label_list[i])
axs.set_ylim([0, 3000])
axs.legend(fontsize=15);